
技术摘要:
本发明实施例提供的一种地下水取样装置,包括:AGV小车;固定台、驱动电机、超声水位仪、滚动结构、主动齿轮、从动齿轮、中空牵引绳、控制器、取样器、通信器、驱动器;驱动器接收到控制指令,驱动AGV小车到达待取样点,控制器控制驱动电机转,滚动结构跟随转,取样器 全部
背景技术:
地下水是水循环的重要组成部分,它为所有生命提供水源,有史以来地下水一直 是就地取之的廉价饮用水源。以此,对地下水质的监测尤为重要。 目前,对地下水的水质监测的第一步都是需要对地下水进行取样,在对所去样品 进行检测,进而得到地下水的水质检测结果,在取样过程中,需要工作人员携带取样设备前 往目标观测井,进行取样,取样完成后,工作人员携带取样设备以及待检测水样返回,返回 后对待检测水样进行检测。 现有的取样手段中,工作人员需要往返多点进行取样,且携带的取样设备质量较 大,工作人员劳动强度高。
技术实现要素:
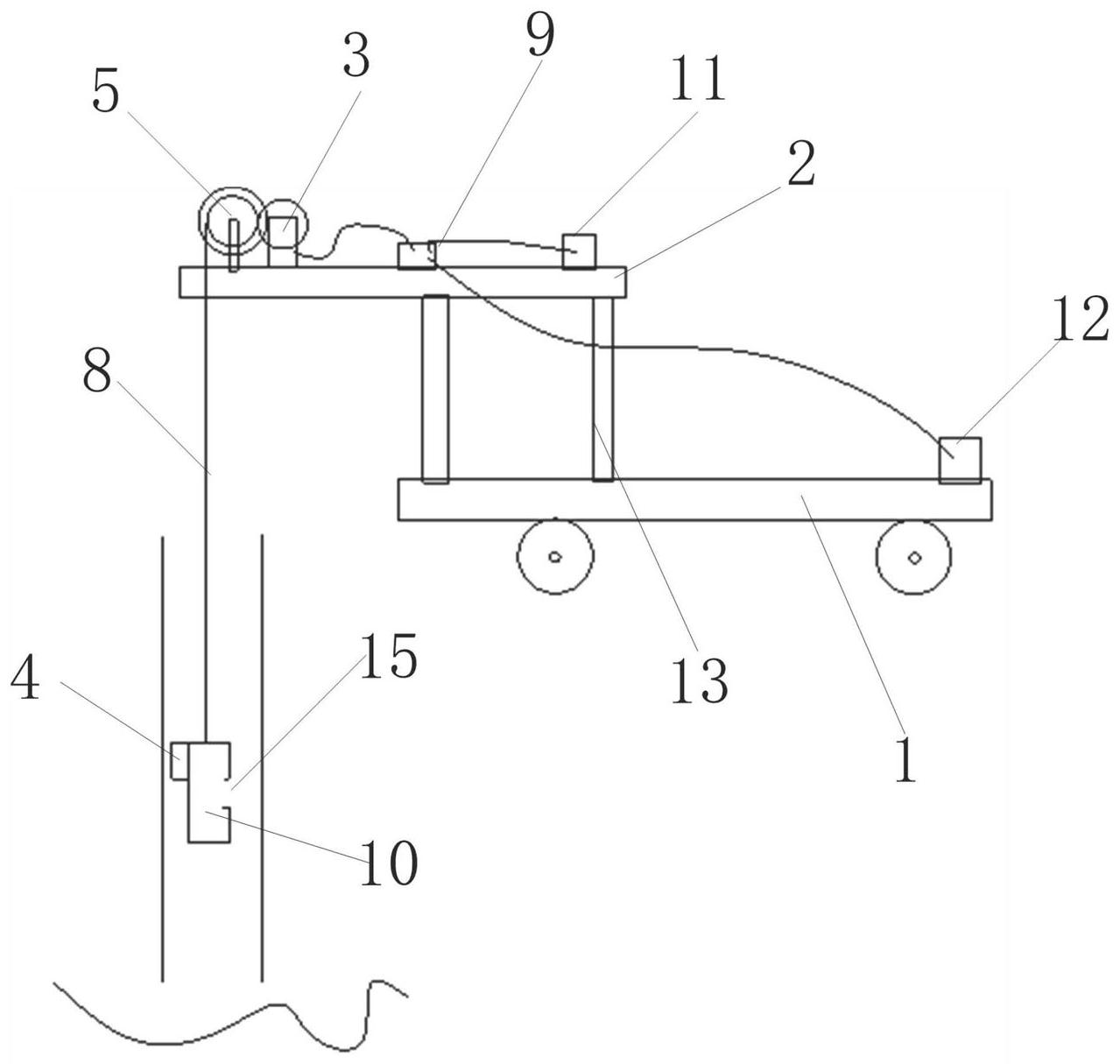
为解决现有技术中,工作人员劳动强度高的技术问题,本发明实施例提供了一种 地下水取样装置,具体技术方案如下: 本发明实施例提供了一种地下水取样装置,包括:AGV小车;固定台、驱动电机、超 声水位仪、滚动结构、主动齿轮、从动齿轮、中空牵引绳、控制器、取样器、通信器、驱动器; 在所述固定台的底部设置有多个支撑结构,所述支撑结构用于将所述固定台支撑 在所述AGV小车上;所述控制器通信连接所述AGV小车;所述通信器通信连接所述控制器;所 述控制器通过电缆控制连接所述驱动器,所述驱动器驱动连接所述AGV小车; 所述驱动电机、所述滚动结构、所述主动齿轮、所述从动齿轮均位于所述固定台的 顶面上; 所述驱动电机驱动连接所述主动齿轮,所述主动齿轮啮合所述从动齿轮,所述动 动齿轮固定连接所述滚动结构;所述驱动电机驱动所述主动齿轮转动,所述主动齿轮啮合 传动所述从动齿轮转动,在所述滚动结构跟随所述从动齿轮转动;所述取样器的的密度大 于水的密度; 在所述中空牵引绳的一端密封连接所述取样器,另一端固定在所述滚动结构上, 所述控制器与所述超声水位仪通过屏蔽电缆连接,所述屏蔽电缆位于所述中空牵引绳内; 所述控制器控制连接所述驱动电机;所述超声水位仪固定在所取样器的外侧壁顶部,且所 述超声水位仪的的工作方向朝向所述取样器的底部方向。 可选的,所述取样器为中空的柱状结构,在所述取样器的侧壁上开设有取样孔,所 述取样口位于所述取样器侧壁的中间位置。 可选的,所述取样器的材质为不锈钢。 可选的,所述驱动电机为伺服电机、直流电机、交流电机中的任一种。 可选的,在所述固定台上开设有通孔,所述滚动结构通过支撑件设置在所述通孔 3 CN 111595621 A 说 明 书 2/8 页 的正上方。 可选的,所述滚动结构包括轴、滚柱、轴孔、第一限位件、第二限位件、支撑件; 所述支撑件固定连接所述轴,所述滚柱通过所述轴孔与所述轴转动连接,所述轴 与所述轴孔适配;所述第一限位部位于所述滚柱的一个端面,所述第二限位部位于所述滚 柱的另一个端面,所述第一限位部固定连接所述滚柱,所述第二限位部固定连接所述滚柱。 可选的,所述超声水位仪包括高频脉冲发射器、高频脉冲接收器、计时器; 所述控制器控制连接所述高频脉冲发射器、所述计时器;所述控制器通信连接所 述高频脉冲接收器。 可选的,所述高频脉冲发射器发送的声波频率为60-80kHz。 一种AGV小车的控制方法,用于驱动上述AGV小车,并将地下水取样装置到达预定 地点;应用于AGV系统,所述AGV系统包括:计算机设备、AGV小车,所述计算机设备与所述AGV 小车通信连接,其特征在于,所述方法包括: 所述计算机设备获取所述AGV小车的目的地,并根据所述目的地确定运行路径; 所述计算机设备向所述AGV小车发送启动命令; 所述AGV小车在接收到所述启动命令后,向所述计算机设备发送应答信息; 所述计算机设备判断在发送所述启动命令后的第一预设时长内,是否接收到所述 AGV小车发送的应答信息,如果未接收到所述AGV小车发送的应答信息,则执行所述向所述 AGV小车发送启动命令的步骤; 所述计算机设备判断向所述AGV小车连续发送所述启动命令的次数是否到达预设 次数,如果到达预设次数,且未接收到所述AGV小车发送的应答信息,则为所述AGV小车标记 故障标识; 当所述AGV小车未标记故障标识时,所述计算机设备生成包含所述运行路径和所 述目的地的运行指令; 所述AGV小车按照所述运行指令运行至所述目的地。 本发明实施例提供的一种地下水取样装置,包括:AGV小车;固定台、驱动电机、超 声水位仪、滚动结构、主动齿轮、从动齿轮、中空牵引绳、控制器、取样器、通信器、驱动器;在 固定台的底部设置有多个支撑结构,支撑结构用于将固定台支撑在AGV小车上;控制器通信 连接AGV小车;通信器通信连接控制器;控制器通过电缆控制连接驱动器,驱动器驱动连接 AGV小车;驱动电机、滚动结构、主动齿轮、从动齿轮均位于固定台的顶面上;驱动电机驱动 连接主动齿轮,主动齿轮啮合从动齿轮,动动齿轮固定连接滚动结构;驱动电机驱动主动齿 轮转动,主动齿轮啮合传动从动齿轮转动,在滚动结构跟随从动齿轮转动;取样器的的密度 大于水的密度;在中空牵引绳的一端密封连接取样器,另一端固定在滚动结构上,控制器与 超声水位仪通过屏蔽电缆连接,屏蔽电缆位于中空牵引绳内;控制器控制连接驱动电机;超 声水位仪固定在所取样器的外侧壁顶部,且超声水位仪的的工作方向朝向取样器的底部方 向。 在实际应用中,驱动器接收到控制指令后,驱动AGV小车到达待取样点,上述待取 样点为预定的观测井,此时,控制器控制驱动电机转动,驱动电机驱动主动齿轮转动,主动 齿轮与从动齿轮啮合,在主动齿轮的带动作用下,从动齿轮转动,从动齿轮与滚动结构固定 连接,从动齿轮转动,滚动结构跟随转动,中空牵引绳的一端固定在滚动结构上,另一端固 4 CN 111595621 A 说 明 书 3/8 页 定连接取样器,取样器跟随中空牵引绳在观测井内下降,控制器实时接收上述超声水位仪 的检测数据,当超声水位仪监测到的距离小于预定距离时,控制器控制驱动电机的转速减 小,上述预定距离可以是50cm,此时,控制器控制驱动电机的转速可以是小于1r/min;驱动 电机的转速减小,即取样器下降的速度也减小,取样器缓慢下降,由于上述取样器的密度大 于水的密度,即上述取样器的平均密度大于水的密度,当取样器接触到地下水面时,在取样 器的自重作用下,继续向水下运动,此时,驱动电机继续旋转,当设置在取样器中部的取样 口位于水面下时,水经由上述取样口进入至取样器内,之后,控制器控制驱动电机反转,在 驱动电机的带动下,中空牵引绳向上运动,设置在中空牵引绳端部的取样器向上运动,直至 运动至极限位置,此时,取样器与上述固定台平齐,驱动器驱动AGV小车返回至起点位置,工 作人员即可获得目标地点的水样,无需其前往目标地点进行取水,减轻工作人员的劳动强 度,方便快捷。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍。 图1为本发明实施例提供的一种地下水取样装置的结构示意图; 图2为本发明实施例提供的滚动结构的结构示意图; 图3为本发明实施例提供的中空牵引绳的结构示意图; 图4为本发明实施例提供的控制连接示意图; 图5为本发明实施例提供的AGV小车运行方法的一种流程示意图。 附图标记: 1AGV小车、2固定台、3驱动电机、4超声水位仪、5滚动结构、6主动齿轮、7从动齿轮、 8中空牵引绳、9控制器、10取样器、11通信器、12驱动器。13支撑结构、14屏蔽电缆、15取样 口、16通孔、17轴、18滚柱、19轴孔、20第一限位件、21第二限位件、22支撑件、23高频脉冲发 射器、24高频脉冲接收器、25计时器。











