
技术摘要:
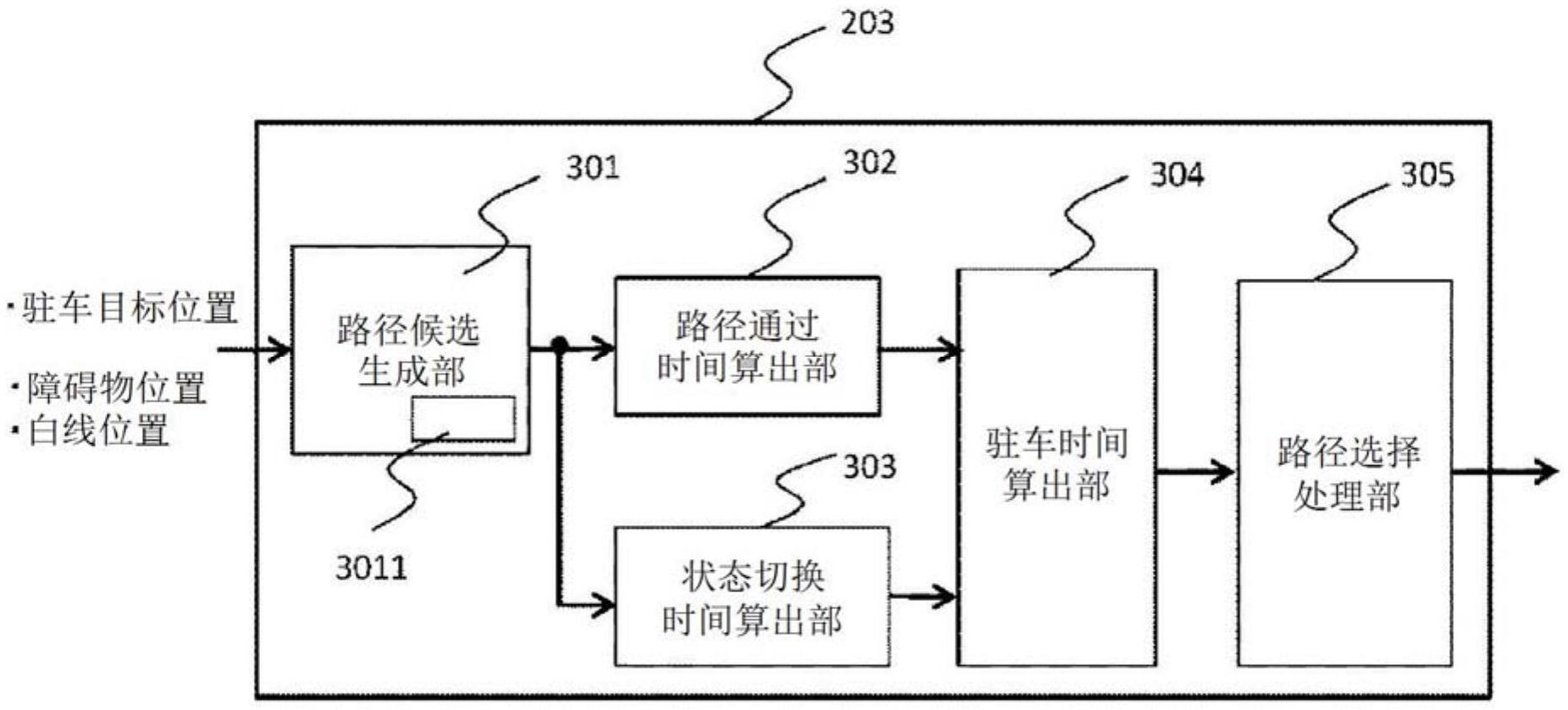
本发明的驻车辅助装置中,路径候选生成部(301)变更基准车速和路径形状来探索从驻车开始位置到达驻车目标位置的路径。路径通过时间算出部(302)针对各路径候选而根据基准车速和路径的长度来算出通过该路径所需的时间。状态切换时间算出部(303)针对各路径候选算出车辆的前 全部
背景技术:
业界开发有用于防止交通事故、减轻拥堵时等驾驶员的驾驶负担的驾驶辅助系 统。作为驾驶辅助系统之一,有自动驻车。自动驻车为如下系统:若驾驶员指定目标驻车框, 则自动进行加速、制动、转向操作的一部分或全部而使车辆停驻至目标驻车框。 专利文献1揭示了作为自动驻车功能的如下技术:在检测到多个驻车空间的情况 下,将驻车时间及反打次数等符合驾驶员设定好的条件的驻车空间作为推荐驻车空间提示 给驾驶员。 现有技术文献 专利文献 专利文献1:日本专利特开2017-65455号公报
技术实现要素:
发明要解决的问题 在专利文献1中,只是从多个驻车空间当中推荐一个符合用户设定好的条件的驻 车空间。 解决问题的技术手段 本发明的驻车辅助装置具备:路径候选生成部,在选择了驻车目标位置时,所述路 径候选生成部变更在路径上行驶时的基准车速及路径形状中的任一方而从驻车开始位置 起到驻车目标位置为止生成至少1个以上的路径;路径通过时间算出部,其算出通过所述路 径候选生成部生成的路径所需的路径通过时间;以及路径选择处理部,其根据所述路径通 过时间而从所述生成的路径当中选择特定路径。 发明的效果 根据本发明,在有多个去往一个驻车空间的驻车路径的情况下,可以选择驻车时 间短的路径、反打次数少的路径来进行自动驻车。 附图说明 图1为配备有搭载驻车辅助装置的车辆控制装置的车辆的构成图。 图2为搭载驻车辅助装置的车辆控制装置的构成框图。 图3为路径生成部的详细的构成框图。 图4为表示驻车时间算出部的输出例的图。 图5为路径候选生成部的流程图。 图6为说明出库路径的图。 图7为表示单侧转舵连接的图。 5 CN 111601744 A 说 明 书 2/15 页 图8为表示S形转舵连接的图。 图9为表示后退开始下的路径生成的图。 图10为表示驻车空间的复杂程度与驻车时间的关系的图。 图11为第2实施方式中的路径生成部的详细的构成框图。 图12为表示第2实施方式中的输入输出装置的显示例的图。 图13为表示第2实施方式中的输入输出装置的显示例的图。 图14为表示第2实施方式中的输入输出装置的显示例的图。 图15为表示第2实施方式中的驾驶员选择路径保存部的处理动作的流程图。 图16为第3实施方式中的路径生成部的详细的构成框图。 图17为表示第3实施方式中的路径运算诊断部的处理动作的流程图。 图18为表示第3实施方式中的路径生成部生成的路径的图。











