
技术摘要:
一种适用于机械手在手操作的目标滑动检测方法,所述方法包括步骤一:对检测系统进行标定和初始化;步骤二:计算机械手坐标系下的作业目标质心的位置及初始坐标区间;步骤三:利用力/力矩传感器实时检测作业目标的受力状态,依据检测结果判断此时作业目标所处的条件;如 全部
背景技术:
随着机器人技术的发展,机器人的应用场景越来越广泛,同时各场景对机器人的 作业能力也提出更高的要求,特别是机器人对目标的抓取和操作能力。为了机器人能够完 成对目标的任务操作,必须确保机器人在抓取目标后,作业目标不能产生意外滑动。因此, 目标滑动的在手检测能力对机器人顺利完成目标操作任务具有重要的作用。 虽然关于机器人的在手操作已有大量的研究,但是适用于机械手在手操作的目标 滑动检测方法较少。公布号CN109176572A的一种用于机器人指尖的滑动检测探头及工作方 法,涉及一种基于光纤光栅的滑动检测探头结构,通过光栅栅区检测目标滑动时的切向应 变并通过解调仪对波长信号进行解调,进而得到目标的滑动信息。虽然该方法理论上可以 检测目标的滑动状态,具有一定可行性,但光纤光栅结构极易受到外界环境变化的影响,且 仍需解调仪进行信号解调,不利于机器人软硬件系统的集成。此外,公布号CN102483364A的 滑动检测装置和滑动检测方法、公布号CN108507469A的滑动检测装置及其检测方法等,针 对滑动检测问题,虽然公开了滑动检测方法,但所述检测方法采用的压敏传感器或光感应 器的输出信号极易受外部环境影响,如外部碰撞或电磁干扰,对复杂应用场景的机器人来 说并不适用。 综上所述,针对目标抓取和任务操作的机器人技术领域,迫切需要一种可有效检 测目标滑动的方法,来提升机器人抓取和操作作业目标的稳定性和可靠性。
技术实现要素:
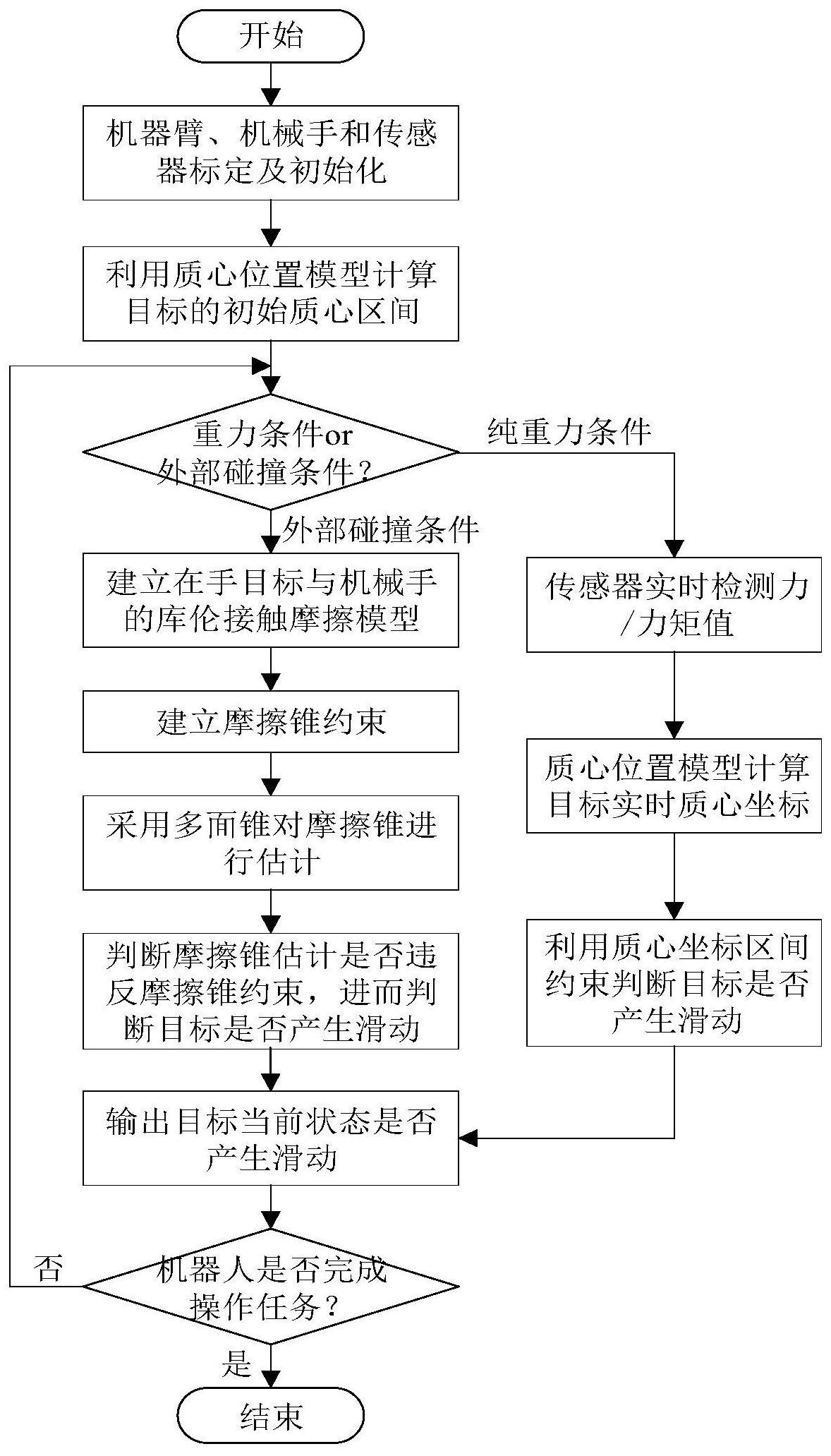
本发明为克服现有技术不足,提供一种适用于机械手在手操作的目标滑动检测方 法。 该滑动检测方法包含纯重力条件和外部碰撞条件的目标滑动的在手检测,具体的 是利用力/力矩传感器检测目标的受力状态,通过纯重力条件和外部碰撞条件的滑动判别 条件,完成各条件下作业目标滑动的在手检测。该检测方法有助于提高机器人对作业目标 的在手检测能力,进而提升机器人抓取和操作目标的稳定性。 本发明所采用的技术方案如下: 一种适用于机械手在手操作的目标滑动检测方法,它包括: 步骤一:对机器人系统进行标定和初始化,包括机械臂、机械手和力/力矩传感器 的标定及初始化; 步骤二:控制机械臂和机械手对作业目标进行抓取,抓取完成时刻记为初始时刻 T0,在时间区间[T0,T1]内,利用力/力矩传感器检测作业目标的受力状态,通过区间运算和 质心位置模型,计算机械手坐标系O-XYZ下的作业目标质心的位置及初始坐标区间 5 CN 111604902 A 说 明 书 2/6 页 步骤三:利用力/力矩传感器实时检测作业目标的受力状态,依据检测结果判断此 时作业目标所处的条件: 如果力/力矩传感器为无脉冲波动输出,则采用纯重力条件的滑动检测方法进行 作业目标滑动检测; 在纯重力条件下,利用力/力矩传感器的力输出值和力矩输出值,根据步骤二中的 作业目标的质心坐标P(x,y,z)的计算方法,计算当前时刻i的作业目标的质心坐标Pi(x,y, z),通过判别i时刻的质心坐标Pi(x,y,z)是否属于初始时刻的质心坐标区间 进而 判断作业目标是否产生滑动,判断条件可用如下公式表示; 如果力/力矩传感器的输出值出现脉冲波动,则采用外部碰撞条件的滑动检测方 法进行目标滑动检测; 在外部碰撞条件下,建立作业目标与机械手接触的库伦摩擦模型,推导接触点Ω 处的摩擦锥约束FCΩ,采用多面锥 对摩擦锥进行估计,通过判别摩擦锥估计是否违反摩 擦锥约束FCΩ,进而判断作业目标是否产生滑动; 步骤四:机器人完成当前状态下作业目标的滑动检测后,若作业目标当前状态不 产生滑动,则完成对作业目标的操作任务;若作业目标当前状态产生滑动,重复步骤三,直 至作业目标当前状态不产生滑动,机器人完成对作业目标的操作任务。 本发明相比现有技术的有益效果是: 一、本发明的目标滑动的检测方法,可以检测纯重力条件或外部碰撞条件下目标 的滑动状态,具体包括:纯重力条件下检测目标滑动状态是利用力/力矩传感器检测目标处 的力和力矩,通过质心位置模型计算目标质心的初始坐标区间,根据实时质心坐标是否满 足初始坐标区间约束来检测目标是否产生滑动;而外部碰撞条件下检测目标滑动状态是建 立作业目标与机械手接触的库伦摩擦模型,推导接触点处的摩擦锥约束,利用多面锥对摩 擦锥进行估计并判别摩擦锥估计是否违反摩擦锥约束,进而判断作业目标是否产生滑动。 本发明所提检测方法可以提高机器人对目标抓取状态的感知能力,有效地增强了机器人对 目标进行在手操作时的稳定性。 二、本发明所述的目标滑动检测方法的检测系统组成简单,所采用的传感器可直 接安装于机械手手指处,通过纯重力条件或外部碰撞条件下的滑动检测方法可以实现机器 人对目标滑动的在手检测,满足了机器人在手操作对作业目标滑动状态的检测要求,特别 适用于机器人对作业目标进行抓取和在手操作领域,对提升智能机器人在手感知和灵巧操 作的能力具有重要意义。 三、本发明可以实现机器人对目标抓取状态的检测,特别是机器人在抓取未知参 数目标时的滑动状态,在一定程度上可以提升机器人对未知参数目标进行抓取和任务操作 的稳定性,在智能机器人的灵巧操作领域具有较大的实用价值。 下面结合附图并通过











