
技术摘要:
本申请公开了一种机器人振动抑制方法、装置、终端和计算机可读存储介质,所述机器人振动抑制方法首先获取机器人各关节的扭转刚度;再获取所述各关节的惯量信息;然后基于各所述扭转刚度和各所述惯量信息,获取各所述关节的共振频率;最后通过陷波滤波器滤除所述共振频 全部
背景技术:
目前工业机器人机械传动部分通常由RV减速器或谐波减速器等传动装置连接电 机和机械臂,而实际传动装置并不是理想刚体,存在一定的弹性,通常会在整个传动系统中 引发机械共振。机械共振对工业机器人的轨迹准确度影响特别大,特别是在对轨迹准确度 要求高的应用比如工业机器人激光切割系统和激光焊接系统,轻微的共振将影响加工件的 质量。 目前常见的工业机器人很少带有机器人振动抑制的功能,一般通过伺服控制执行 装置来达到机器人振动抑制的效果。而伺服控制执行装置一般设置两个机器人振动抑制频 率机器人振动抑制效果不佳;有些功能比较强大的伺服执行装置开发了通过扫频方法来抑 制多频率振动,但这种方法需要强大的计算能力。
技术实现要素:
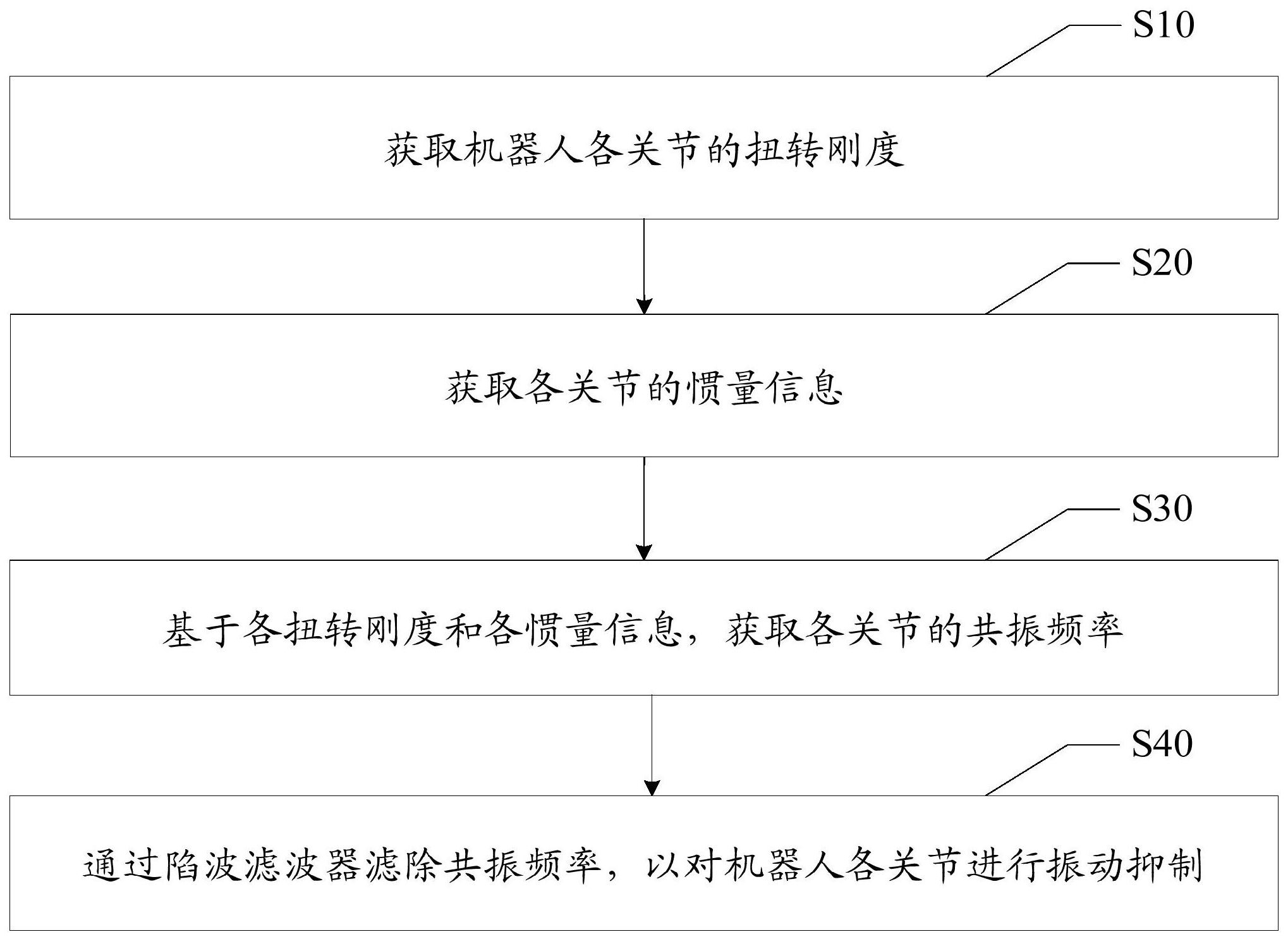
本申请的主要目的在于提供一种机器人振动抑制方法、装置、终端及计算机存储 介质,旨在解决现有技术中机器人振动抑制效果不佳、共振频率计算复杂的技术问题。 为实现上述目的,本申请实施例提供一种机器人振动抑制方法,所述机器人振动 抑制方法的步骤包括: 获取机器人各关节的扭转刚度; 获取所述各关节的惯量信息; 基于各所述扭转刚度和各所述惯量信息,获取各所述关节的共振频率; 通过陷波滤波器滤除所述共振频率,以对所述机器人各关节进行振动抑制。 可选地,所述机器人各关节包括第一目标关节和第二目标关节,所述获取机器人 各关节的扭转刚度的步骤包括: 按照预设方法获取所述第一目标关节的当前扭转刚度,其中,所述第一目标关节 为扭转刚度动态变化的关节; 使用扭转刚度测量装置测量所述第二目标关节的实际扭转刚度,其中,所述第二 目标关节为相对所述第一目标关节预期扭转刚度保持不变的关节。 可选地,所述按照预设方法获取所述第一目标关节的当前扭转刚度的步骤包括: 将所述机器人中预置转动连接的第二关节和第三关节的运动范围进行划分,以获 取所述第二关节和所述第三关节的关节角节点组合; 获取各所述关节角节点组合与所述机器人的第一关节理论扭转刚度的离散关系, 所述第一关节与所述第二关节远离所述第三关节的端部转动连接; 基于各所述关节角节点组合与所述第一关节理论扭转刚度的离散关系和线性插 4 CN 111590558 A 说 明 书 2/12 页 值法,获得所述第一关节的当前扭转刚度。 可选地,所述按照预设方法获取所述第一目标关节的当前扭转刚度的步骤还包 括: 将所述第三关节的运动范围进行划分,以获取所述第三关节的关节角节点; 获取各所述关节角节点与所述第二关节理论扭转刚度的离散关系; 基于各所述关节角节点与所述第二关节理论扭转刚度的离散关系和线性插值法, 获得所述第二关节的当前扭转刚度。 可选地,所述获取所述各关节的惯量信息的步骤包括: 基于动力学模型,获取所述各关节的关节惯量; 获取所述机器人的电机惯量,其中,所述电机惯量包括电机转子惯量和抱闸惯量; 基于所述电机惯量和各所述关节惯量,获取所述各关节的等效惯量; 将所述关节惯量和所述等效惯量作为所述惯量信息。 可选地,所述基于各所述扭转刚度和各所述惯量信息,获取各所述关节的共振频 率的步骤包括: 基于获取的各所述关节的关节惯量和各所述关节的扭转刚度,获取各所述关节的 抗共振频率; 基于获取的各所述关节的等效惯量和各所述关节的扭转刚度,获取各所述关节的 自然共振频率; 将所述抗共振频率和所述自然共振频率作为各所述关节的共振频率。 可选地,所述通过陷波滤波器滤除所述共振频率,以对所述机器人各关节进行振 动抑制的步骤包括: 将各所述共振频率发送至陷波滤波器,作为所述陷波滤波器的中心频率,其中,所 述中心频率为所述陷波滤波器的信号迅速衰减频率; 获取所述陷波滤波器滤除所述中心频率后得到的驱动信号; 将所述驱动信号发送至所述机器人的伺服驱动器,作为所述伺服驱动器的工作信 号,以对所述机器人各关节进行振动抑制,其中,所述伺服驱动器为所述机器人的轨迹执行 设备。 本申请还提供一种机器人振动抑制装置,所述机器人振动抑制装置包括: 第一获取模块,用于获取机器人各关节的扭转刚度; 第二获取模块,用于获取所述各关节的惯量信息; 第三获取模块,用于基于各所述扭转刚度和各所述惯量信息,获取各所述关节的 共振频率; 振动抑制模块,用于通过陷波滤波器滤除所述共振频率,以对所述机器人各关节 进行振动抑制。 可选地,所述第一获取模块包括: 第一获取单元,用于按照预设方法获取所述第一目标关节的当前扭转刚度,其中, 所述第一目标关节为扭转刚度动态变化的关节; 第二获取单元,用于使用扭转刚度测量装置测量所述第二目标关节的实际扭转刚 度,其中,所述第二目标关节为相对所述第一目标关节预期扭转刚度保持不变的关节。 5 CN 111590558 A 说 明 书 3/12 页 可选地,所述第一获取单元包括: 第一划分子单元,用于将所述机器人中预置转动连接的第二关节和第三关节的运 动范围进行划分,以获取所述第二关节和所述第三关节的关节角节点组合; 第一获取子单元,用于获取各所述关节角节点组合与所述机器人的第一关节理论 扭转刚度的离散关系,所述第一关节与所述第二关节远离所述第三关节的端部转动连接; 第二获取子单元,用于基于各所述关节角节点组合与所述第一关节理论扭转刚度 的离散关系和线性插值法,获得所述第一关节的当前扭转刚度。 可选地,所述第一获取单元还包括: 第二划分子单元,用于将所述第三关节的运动范围进行划分,以获取所述第三关 节的关节角节点; 第三获取子单元,用于获取各所述关节角节点与所述第二关节理论扭转刚度的离 散关系 第四获取子单元,用于基于各所述关节角节点与所述第二关节理论扭转刚度的离 散关系和线性插值法,获得所述第二关节的当前扭转刚度。 可选地,所述第二获取模块包括: 关节惯量获取单元,用于基于动力学模型,获取所述各关节的关节惯量; 电机惯量获取单元,用于获取所述机器人的电机惯量,其中,所述电机惯量包括电 机转子惯量和抱闸惯量; 等效惯量获取单元,用于基于所述电机惯量和各所述关节惯量,获取所述各关节 的等效惯量; 惯量信息获取单元,用于将所述关节惯量和所述等效惯量作为所述惯量信息。 可选地,所述第三获取模块包括: 抗共振频率获取单元,用于基于获取的各所述关节的关节惯量和各所述关节的扭 转刚度,获取各所述关节的抗共振频率; 自然共振频率获取单元,用于基于获取的各所述关节的等效惯量和各所述关节的 扭转刚度,获取各所述关节的自然共振频率; 共振频率获取单元,用于将所述抗共振频率和所述自然共振频率作为各所述关节 的共振频率。 可选地,所述振动抑制模块包括: 发送单元,用于将各所述共振频率发送至陷波滤波器,作为所述陷波滤波器的中 心频率,其中,所述中心频率为所述陷波滤波器的信号迅速衰减频率; 驱动信号获取单元,用于获取所述陷波滤波器滤除所述中心频率后得到的驱动信 号; 工作信号获取单元,用于将所述驱动信号发送至所述机器人的伺服驱动器,作为 所述伺服驱动器的工作信号,以对所述机器人各关节进行振动抑制,其中,所述伺服驱动器 为所述机器人的轨迹执行设备。 本申请还提供一种终端,所述终端包括:存储器、处理器及存储在所述存储器上并 可在所述处理器上运行的机器人振动抑制程序,所述机器人振动抑制程序被所述处理器执 行时实现如上所述的机器人振动抑制方法的步骤。 6 CN 111590558 A 说 明 书 4/12 页 本申请还提供一种计算机存储介质,所述计算机存储介质上存储有机器人振动抑 制程序,所述机器人振动抑制程序被处理器执行时实现如上所述的机器人振动抑制方法的 步骤。 本申请在机器人振动抑制的过程中,首先获取机器人各关节的扭转刚度;再获取 所述各关节的惯量信息;然后基于各所述扭转刚度和各所述惯量信息,获取各所述关节的 共振频率;最后通过陷波滤波器滤除所述共振频率,以对所述机器人各关节进行振动抑制, 实现了共振频率的滤除,从而减少了机器人因共振引起的关节抖动,提高了机器人各关节 运行轨迹的精确度。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而 言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。 图1为本申请实施例一个可选的终端的硬件结构示意图; 图2为本申请机器人振动抑制方法第一实施例的流程示意图; 图3为本申请机器人振动抑制方法机器人各关节机械传动系统图; 图4为本申请机器人振动抑制方法机械传动转置模型图; 图5为本申请机器人振动抑制方法六关节机器人示意图; 图6为本申请机器人振动抑制方法第三实施例的流程示意图; 图7为本申请机器人振动抑制方法第四实施例的流程示意图; 图8为本申请机器人振动抑制方法第五实施例的流程示意图; 图9为本申请机器人振动抑制方法第六实施例的流程示意图; 图10为本申请机器人振动抑制方法第七实施例的流程示意图; 图11为本申请机器人振动抑制装置的功能模块示意图。 本申请目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











