
技术摘要:
本发明公开了一种用于管道探伤的爬行机器人结构装置,涉及工业机器人应用装置领域。本发明中:驱动动力装置固定连接有第一支撑连板和第二支撑连板;活动节板的一侧固定连接有第三支撑连板和第四支撑连板;活动节板上固定装设有第一传感探测机构、第二传感探测机构。第 全部
背景技术:
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编 排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类 工作的工作,例如生产业、建筑业,或是危险的工作。 在一些工厂、车间内,存在着较多的管道设施,管道设施的长期使用,就需要对其 进行相应的检修或检测,管道外侧的检查一般比较容易操作,而管道内侧的状况却很难监 测;如何有效的对工厂、车间内的管道设施的内侧状况进行监测/分析,成为需要解决的问 题。
技术实现要素:
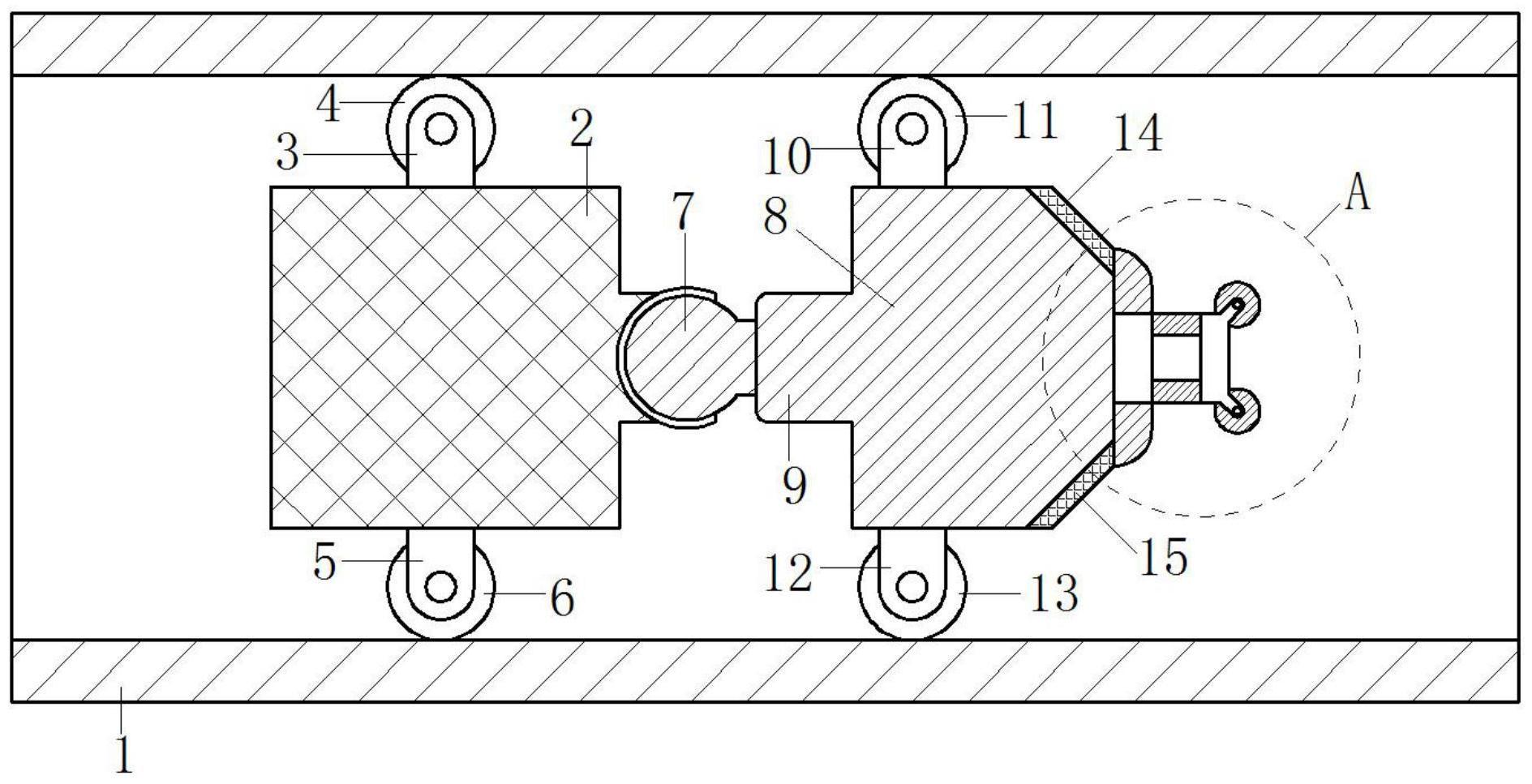
本发明要解决的技术问题是提供一种用于管道探伤的爬行机器人结构装置,通过 在活动节板的前端侧设置传感探测机构,对相应位置的管壁进行有效的检测;通过设置广 角摄像装置,以及设置与广角摄像装置相配合的补光装置,实时的对管壁进行图像信息采 集操作,便于具象化的对管壁进行监测分析。 为解决上述技术问题,本发明是通过以下技术方案实现的: 本发明提供一种用于管道探伤的爬行机器人结构装置,包括驱动动力装置,驱动 动力装置的一侧固定连接有第一支撑连板;驱动动力装置的另一侧固定连接有第二支撑连 板;第一支撑连板上装设有第一驱动轮机构;第二支撑连板上装设有第二驱动轮机构。 包括活动节板,活动节板上固定连接有第一端侧连板;第一端侧连板与驱动动力 装置之间设有万向节机构;活动节板的一侧固定连接有第三支撑连板;活动节板的另一侧 固定连接有第四支撑连板;第三支撑连板上装设有第三辅助轮机构;第四支撑连板上装设 有第四辅助轮机构;活动节板上固定装设有第一传感探测机构、第二传感探测机构;活动节 板的前端侧固定连接有第一支撑基板。 第一支撑基板的两侧分别固定装设有第一广角摄像装置、第二广角摄像装置;第 一支撑基板上固定装设有第一补光装置和第二补光装置;第一补光装置和第二补光装置的 一端侧固定连接有第二支撑基板;第二支撑基板上设有第一导向辅助轮、第二导向辅助轮。 其中,第一传感探测机构、第二传感探测机构上设有超声波传感器/光电式传感 器。 其中,第一广角摄像装置、第二广角摄像装置上都装设有广角摄像头;第一补光装 置的位置与第一广角摄像装置上的广角摄像头的位置相配合;第二补光装置的位置与第二 广角摄像装置上的广角摄像头的位置相配合。 其中,第一导向辅助轮和第二导向辅助轮都倾斜向外设置在第二支撑基板的边角 3 CN 111578040 A 说 明 书 2/3 页 位置。 其中,第一驱动轮机构、第二驱动轮机构分别独立与驱动动力装置的驱动输出机 构相连。 与现有的技术相比,本发明的有益效果是: 本发明通过在驱动动力装置与活动节板之间装设万向节机构,从而便于驱动动力 装置对活动节板进行推动前进过程中,进行有效的方向转变;通过在活动节板的前端侧设 置传感探测机构,对相应位置的管壁进行有效的检测;通过设置广角摄像装置,以及设置与 广角摄像装置相配合的补光装置,实时的对管壁进行图像信息采集操作,便于具象化的对 管壁进行监测分析;通过第一导向辅助轮、第二导向辅助轮,便于提前进行活动节板的微调 节转向,同时也保护了补光装置和摄像装置。 附图说明 图1为本发明的管道探伤的爬行机器人结构装置的结构示意图; 图2为图1中A处局部放大的结构示意图; 其中:1-管道壁板;2-驱动动力装置;3-第一支撑连板;4-第一驱动轮机构;5-第二 支撑连板;6-第二驱动轮机构;7-万向节机构;8-活动节板;9-第一端侧连板;10-第三支撑 连板;11-第三辅助轮机构;12-第四支撑连板;13-第四辅助轮机构;14-第一传感探测机构; 15-第二传感探测机构;16-第一支撑基板;17-第一广角摄像装置;18-第二广角摄像装置; 19-第一补光装置;20-第二补光装置;21-第二支撑基板;22-第一导向辅助轮;23-第二导向 辅助轮。











