
技术摘要:
本发明公开了一种双固定旋转式包装箱封边机,包括圆形底板,在圆形底板上固定有左支撑夹持机构和右支撑夹持机构,所述左支撑夹持机构和右支撑夹持机构之间设有包装箱通道间隔,所述右支撑夹持机构与左支撑夹持机构的结构相对称;在支撑夹持机构或右支撑夹持机构上安装 全部
背景技术:
电商用包装箱将产品包装之后,运输过程中边角会经常因为搬运产生的摩擦产生 磨损,为了防止边角磨损导致的包装箱内物品的侧漏,需要对包装箱的边角进行圆周胶带 缠绕封装,在生产车间进行大批量的流水线作业时显然是人工操作进行胶带封口是无法满 足要求的,因此需要针对包装箱的箱盖胶带封口、包装箱边角处胶带封口的自动化设备来 提高工作效率; 目前缠绕包装机主要是在转台上固定两根竖直铁杆,然后将包装箱放在两根竖直铁杆 之间进行固定,然后电机带动转台、竖直铁杆和包装箱一起转动,外面进行胶带的缠绕,缠 绕结束后取下包装箱。然而胶带是将包装箱和两根竖直铁杆同时包裹在内部的,胶带会粘 接在竖直铁杆上,导致取箱子时比较费时费力,也影响缠绕粘接效果。 目前也有边角封口设计的出现,例如,例如中国专利文献,授权公告号 CN106240937B,公开了一种角边封箱机,包括机身主体、进箱机构、输送机构、贴带机构和刷 平机构,所述进箱机构固定在所述输送机构入口处,所述贴带机构固定在机身主体上,所述 刷平机构跟随在所述贴带机构后方固定在机身主体上。上述专利虽然解决了包装箱边角封 箱,但是这种方案只能实现上下面或者边角的单独封口而无法对包装箱边角整周缠绕封 装,而且,最多只能粘有限长度,即最多单排半周长度,封装不够牢固,保护效果有限,而且 整个设备结构复杂成本高,价格贵。
技术实现要素:
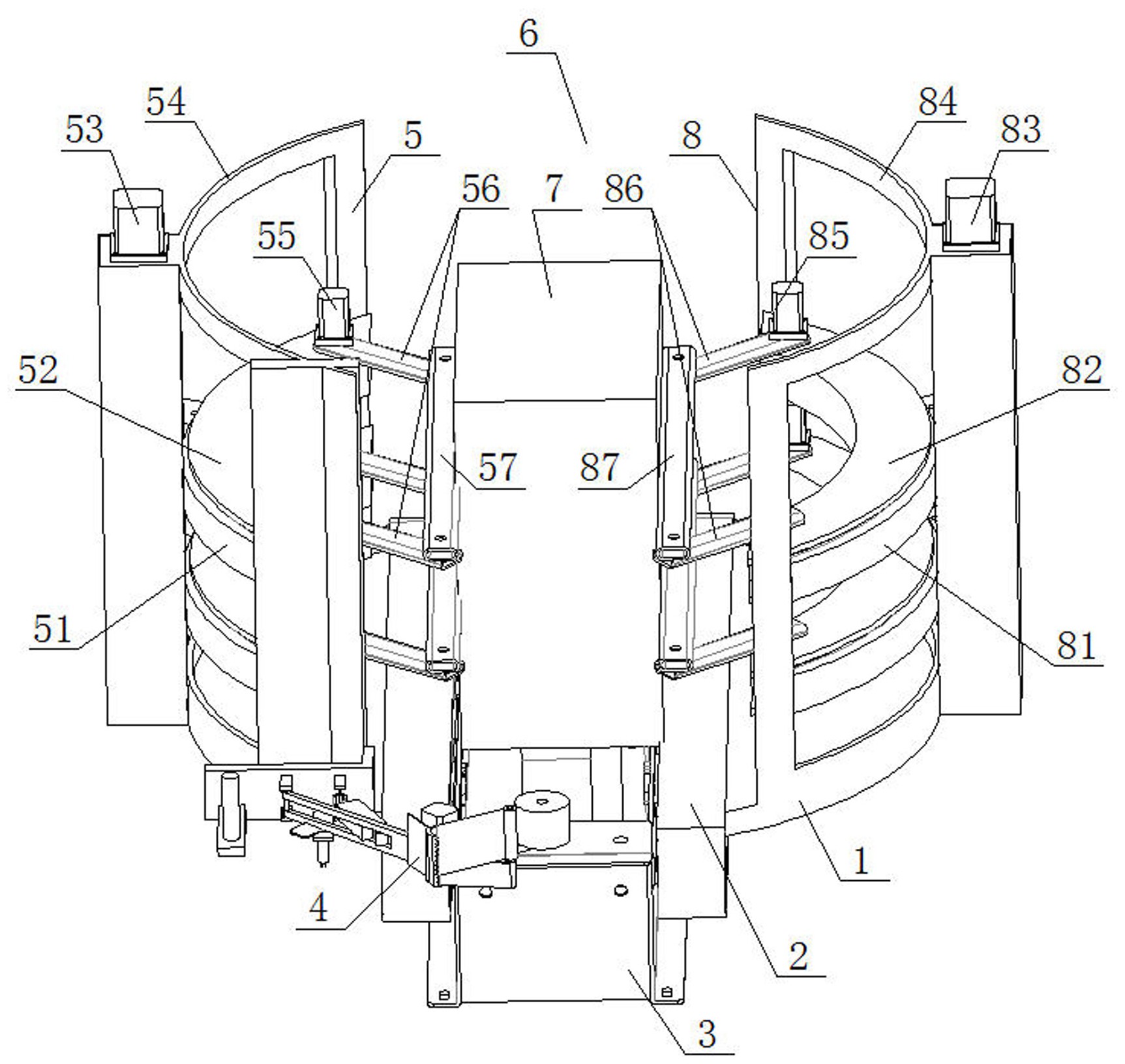
本发明目的在于提供一种双固定旋转式包装箱封边机;为达到上述目的所采取的 技术方案是: 一种双固定旋转式包装箱封边机,包括圆形底板,在圆形底板上固定有左支撑夹持机 构和右支撑夹持机构,所述左支撑夹持机构和右支撑夹持机构之间设有包装箱通道间隔, 所述右支撑夹持机构与左支撑夹持机构的结构相对称; 所述左支撑夹持机构包括垂直连接在圆形底板边缘处的左弧形支撑框架,所述左弧形 支撑框架的弧形开口朝向圆形底板中心方向设置,且左弧形支撑框架的弧形形状与圆形底 板的圆周形状相匹配,在左弧形支撑框架内滑动连接有两个左夹持单元,所述两个左夹持 单元一个位于另一个上方,所述左夹持单元包括左弧形滑轨,在左弧形支撑框架上转动连 接有竖直设置的左动力丝杠、安装有为左动力丝杠转动提供动力的第一左步进电机,在左 弧形滑轨上设有用于穿过左动力丝杠的左螺纹孔;在左弧形滑轨上滑动连接有左弧形滑 框,在左弧形滑轨上安装有第二左步进电机,在第二左步进电机输出轴上安装有用于带动 左弧形滑框在左弧形滑轨上滑动的左动力轮或者左动力齿轮,在左弧形滑框上铰接有两个 平行设置的左摆臂,在两个左摆臂末端铰接有左夹持臂,在左弧形滑框上安装有用于带动 4 CN 111591526 A 说 明 书 2/5 页 其中一个左摆臂转动的第三左步进电机; 在支撑夹持机构或右支撑夹持机构上安装有胶带封箱头,所述胶带封箱头位于包装箱 通道间隔的出箱端口处。 优选的,在圆形底板上设有传输带,所述传输带位于包装箱通道间隔内且与包装 箱通道间隔平行设置。 优选的,所述右支撑夹持机构包括垂直连接在圆形底板边缘处的右弧形支撑框 架,所述右弧形支撑框架的弧形开口朝向圆形底板中心方向设置,且右弧形支撑框架的弧 形形状与圆形底板的圆周形状相匹配,在右弧形支撑框架内滑动连接有两个右夹持单元, 所述两个右夹持单元一个位于另一个上方,所述右夹持单元包括右弧形滑轨,在右弧形支 撑框架上转动连接有竖直设置的右动力丝杠、安装有为右动力丝杠转动提供动力的第一右 步进电机,在右弧形滑轨上设有用于穿过右动力丝杠的右螺纹孔;在右弧形滑轨上滑动连 接有右弧形滑框,在右弧形滑轨上安装有第二右步进电机,在第二右步进电机输出轴上安 装有用于带动右弧形滑框在右弧形滑轨上滑动的右动力轮或者右动力齿轮,在右弧形滑框 上铰接有两个平行设置的右摆臂,在两个右摆臂末端铰接有右夹持臂,在右弧形滑框上安 装有用于带动其中一个右摆臂转动的第三右步进电机; 其中,位于上方的左夹持单元与位于上方的右夹持单元位置相对应,位于下方的左夹 持单元与位于下方的右夹持单元位置相对应;左夹持臂和右夹持臂对称分布在包装箱通道 间隔左右两侧,且左夹持臂和右夹持臂与包装箱通道间隔平行设置。 优选的,所述包装箱通道间隔的宽度小于左弧形滑框或右弧形滑框的长度。 优选的,在左夹持臂和右夹持臂的内侧面上设有弹性缓冲层。 优选的,在左弧形支撑框架上设有用于标示左弧形滑轨上下位置的左刻度值;在 右弧形支撑框架上设有用于标示右弧形滑轨上下位置的右刻度值。 优选的,所述胶带封箱头包括连接板,在连接板上设有胶卷安装座,在胶卷安装座 下方的连接板上铰接有拐臂,在拐臂上表面设有含油塑料膜,所述拐臂末端背离胶卷安装 座方向设置且在拐臂末端转动连接有胶带压紧轮,在连接板与拐臂之间设有用于拉动拐臂 向被封包装箱方向压紧的拉簧,在拐臂上安装有胶带切断机构。 优选的,所述胶带切断机构包括刀臂,所述刀臂铰接在胶带压紧轮上方的拐臂上, 在刀臂末端设有远离拐臂方向设置的刀头,在拐臂上安装有用于带动刀臂摆动的步进电 机。 优选的,在刀臂末端设有与刀头反方向设置的胶带压板。 优选的,在竖直板和刀臂之间设有接近开关传感器。 本发明所具有的有益效果为:(1)现有封箱机采用“弹簧加胶带臂”的方式只能封 一条线而且不能周向全封,而由于本发明是通过包装箱的快速旋转动作完成胶带的快速缠 绕和粘贴的,因此可以完成包装箱整周的完整封装; (2)现有胶带全封装的封箱机,其两侧采用两根竖直铁杆的做法,而竖直铁杆是固定安 装在底板上的,这样就会使得胶带将两根铁杆一同包裹在内部从而阻碍整周胶带直接粘贴 在包装箱的缺点,本发明的旋转夹持机构可以避开胶带粘接路径避免互相干涉,从而保证 胶带直接粘贴在包装箱上;取放包装箱方便快捷,操作简单,工作效率高; (3)旋转夹持机构的左右两个夹持臂能够夹持包装箱的同时还可以实现包装箱位置的 5 CN 111591526 A 说 明 书 3/5 页 移动,从而实现包装箱上不同胶带粘接位置与封口间隔位置的对准作用,从而实现包装箱 多排胶带的快速自动化封装,大大提高了封装效率; (4)在夹持臂内侧面、包装箱下压板底侧面上均设有弹性缓冲层,一是防止对包装箱造 成损坏,二是可以增大摩擦力夹持更加稳定牢固;另一方面,通过在包装箱下压板的侧边上 设有用于感应包装箱顶部的接触开关,从而进一步精确控制包装箱下压板运行的距离,避 免过度挤压包装箱; (5)通过旋转夹持机构实现了对包装箱的快速自动化夹持固定,为胶带的牢固顺畅地 粘接做好了前提准备; (6)旋转夹持机构的传输带配合其它部分动作的配合保证了包装箱顺利合适时候地运 入或者运出旋转夹持机构,整个过程更加自动化; (7)旋转夹持机构本身与封箱头机构相配合带动包装箱快速旋转实现包装箱的快速胶 带粘接动作; (8)封箱头机构能够上下移动从而适应不同尺寸包装箱的胶带粘接; (9)当包装箱顶靠在胶带压紧轮上时实现了胶带初始端的自动粘接,同时刀臂的摆动 会触发接近开关工作,从而将此信号传输给总控制系统控制旋转夹持机构一系列动作,整 个过程自动化程度高; (10)胶带切断机构的刀臂末端设有两个方向相反的刀头和胶带压板,这样即可以利用 刀头进行快速切断胶带,还可以通过胶带压板实现对胶带进行限位保证胶带运行顺畅避免 出现扭转; (11)通过两个两个左夹持单元和两个右夹持单元配合动作实现了双开口包装箱竖向 封边时端盖盖合不严的问题。 附图说明 图1为本发明的立体结构示意图; 图2为图1中弧形滑轨和弧形滑框的立体结构示意图; 图3为图2弧形滑框的立体结构示意图; 图4为胶带封箱头的立体结构示意图之一; 图5为胶带封箱头的立体结构示意图之二。











