
技术摘要:
本发明涉及一种智能网联汽车五轴转向测试装备,包括底座、模拟路面负载和转向负载的两组转向驱动组件、模拟方向盘转向动作的伺服电机;所述两组转向驱动组件分别设置在所述底座的两侧;所述伺服电机通过联轴器与被测样件连接;同时配套有智能温控箱可以对被测样件进行 全部
背景技术:
随着社会的发展和人民生活水平的提高,全世界汽车产量逐年增加,中国的汽车 市场拥有广阔的前景,因而汽车内部的一些零部件也有很广阔的市场前景。随着技术的发 展,产品的更新换代在所难免,旧的产品终究要被新的产品取代,传统的HPS(液压助力转向 也要被EPS(电动助力转向)所取代,当前EPS已在轻型车(轿车)上得到应用,其性能已得到 人们的普遍认可。 汽车电动助力转向装置的关键技术涉及机械、电机、电子、控制及材料等领域,是 比较典型的机电一体化产品。随着汽车电动助力转向装置的发展,为了改善装置的性能,为 了保证产品的质量,对汽车电动助力转向装置的性能检测便显得尤其重要。加强对汽车电 动助力转向装置的监督检验,使其减少机件故障,避免事故,发现问题及时维修,以确保汽 车电动助力转向装置的技术性能处于良好状态。 目前,汽车转向测试装置多为三轴,测试项目有限,测试精度有限,影响对转向装 置的综合性能评估。如中国专利CN101696908A公开了一种汽车转向系统性能试验装置,包 括转向模拟系统、轴向加载系统、悬架模拟系统和汽车转向系统,所述转向模拟系统用自动 和手动方式模拟方向盘的转动,轴向加载系统模拟转向载荷并通过Bell机构加载到汽车转 向系统(由转向柱、转向器、横拉杆和模拟转向节组成)上,悬架模拟系统模拟汽车行驶时车 轮的跳动。 因此,如何提供一种汽车转向测试装备,以解决现有技术中所存在的问题,是目前 本领域技术人员亟待解决的技术问题。
技术实现要素:
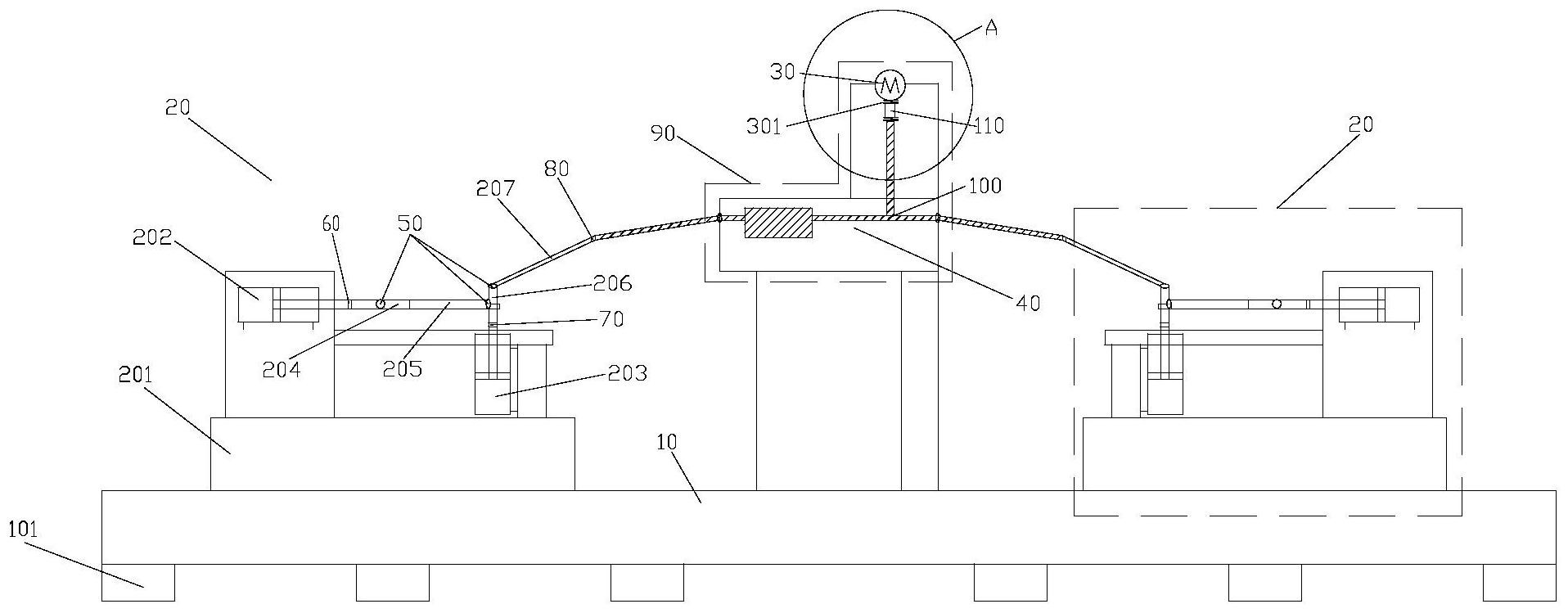
有鉴于此,本申请的目的在于提供一种智能网联汽车五轴转向测试装备,以实现 高性能联合联动测试,且使用方便、可靠性好、精度高、易于维护,进一步提升核心部件的测 试方法。 为了达到上述目的,本申请提供如下技术方案。 一种智能网联汽车五轴转向测试装备,包括底座、模拟路面负载和转向负载的两 组转向驱动组件、模拟方向盘转向动作的伺服电机; 所述两组转向驱动组件分别设置在所述底座的两侧;所述伺服电机通过联轴器与 被测样件连接。 优选地,每组所述转向驱动组件包括: 支架,其为可移动支架,以满足不同车辆转向系统的参数结构; 横向驱动机构,其用于提供横向施加作用力,以实现横向位移动作; 纵向驱动机构,其用于提供纵向施加作用力,以实现纵向位移动作; 3 CN 111595602 A 说 明 书 2/5 页 至少4个作动杆件,其用于实现横向驱动机构、纵向驱动机构与被测样件的连接。 优选地,所述作动杆件包括第一作动杆件、第二作动杆件、第三作动杆件、第四作 动杆件,相邻作动杆件之间通过球铰连接; 所述第一作动杆件与第二作动杆件用于实现横向位移动作,所述第三作动杆件用 于实现纵向位移动作。 优选地,所述横向驱动机构、纵向驱动机构分别通过导向轴承和转向节力臂与作 动杆件连接。 优选地,所述横向驱动机构与作动杆件的连接处设置有用于监测传动力的传动力 传感器。 优选地,所述纵向驱动机构与作动杆件的连接处设置有平面推力滚针轴承,以实 现在较小空间下获得很高的轴向载荷力。 优选地,所述作动杆件与被测样件的连接处设置有拉杆力传感器,用以采集相应 的拉杆力。 优选地,该装备还包括智能温控箱,用于实现对被测样件进行高低温试验,所述智 能温控箱设置有可视化显示屏,实现温度的实时显示和记录。 优选地,所述底座为T型槽地板,所述底座下方设置有空气减震器。 优选地,该装备还包括: 电力驱动柜,其提供基本的装备供电; HIL系统柜,其基于NI PXI架构,结合主流的CARSIM提供车辆动力学仿真软件平 台,进行实时数据的采集、监测、记录处理; 自动化测控上位机,其可以实时显示装备的相关参数以及实时下发接收相关操作 指令。 本发明所获得的有益技术效果: 1)本发明解决了智能网联汽车零部件在研发阶段的高性能联合联动测试,区别于 传统的单零件测试,所有零件可以模拟整车负载环境中执行的测试以及与电控部件在环的 联动协同测试,极大地提高了零部件的研发效率; 2)本发明动态耦合作动系数高度复杂,已经达到了5轴,可以实现道路横向和纵向 负载;技术参数要求较高,符合全部乘用车和部分商用车水平;控制与执行单元实时联合测 试,实现半物理HIL硬件在环智能测试; 3)本发明适用于汽车关键零部件的半物理化硬件在环测试装备,其特点是可以将 感知系统、执行系统以及控制系统联合起来放置于同一个测试环境中,得到一个综合各个 系统的关键零部件的测试结果; 4)本发明具有很好的扩展性,预留有工业以太网等接口,可与其他ADAS(高级辅助 驾驶)测试设备进行联合通信仿真。 上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段, 从而可依照说明书的内容予以实施,并且为了让本申请的上述和其他目的、特征和优点能 够更明显易懂,以下以本申请的较佳实施例并配合附图详细说明如后。 根据下文结合附图对本申请具体实施例的详细描述,本领域技术人员将会更加明 了本申请的上述及其他目的、优点和特征。 4 CN 111595602 A 说 明 书 3/5 页 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在所有附图中,类似的元件或部分一般由类似的附图标记标识。 附图中,各元件或部分并不一定按照实际的比例绘制。 图1是本公开一种实施例中智能网联汽车五轴转向测试装备的结构示意图; 图2是本公开一种实施例中转向驱动组件的结构示意图; 图3是附图1中A处的放大图。 在以上附图中:10、底座;101、空气减震器;20、转向驱动组件;201、支架;202、横向 驱动机构;203、纵向驱动机构;204、第一作动杆件;205、第二作动杆件;206、第三作动杆件; 207、第四作动杆件;30、伺服电机;301、联轴器;40、被测样件;50、球铰;60、传动力传感器; 70、平面推力滚针轴承;80、拉杆力传感器;90、智能温控箱;100、齿条位移传感器;110、扭矩 传感器。











