
技术摘要:
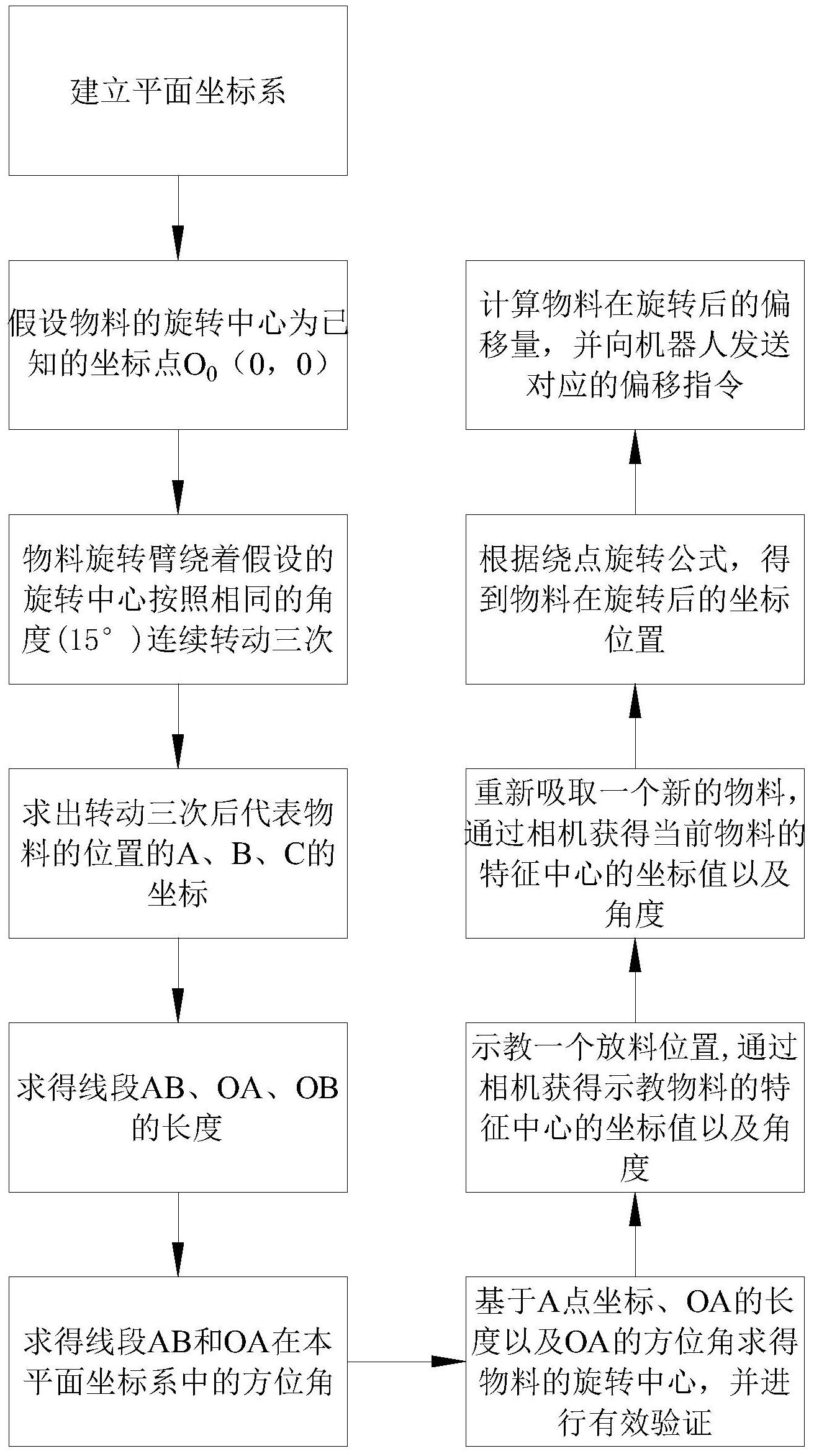
本发明公开一种搬运机械手的物料位置标定方法,包括以下步骤:建立平面坐标系,先假设物料的旋转中心为已知的坐标点O已知;在平面坐标系中,机械手的旋转臂绕旋转中心连续转动三次,位于旋转臂的末端的物料所处的位置分别用A、B、C代表;求A、B、C的坐标,和求得线段AB 全部
背景技术:
搬运机器人是近代高科技自动化的产物,能够根据设定的指令进行自动化的搬运 工作;其中,机械手是搬运机器人的主要代表,可通过编程来完成各种预期的作业任务,在 构造和性能上兼有人手和机器各自的优点,基于作业的准确性和通用性,从而在国民经济 各领域有着广阔的发展前景,逐渐进入工业全自动化时代,实现制造业升级,推进制造2025 的进程。 在现有的自动化生产领域中,物料的位置关系以及摆放姿态主要靠机械手上的各 种传感器感应或者图像识别来确定,例如在机械手搬运物料的过程中,需要对物料进行标 定,从而确保机械手能精确地将物料放置在预定的位置上。 具体地,在相机往上对物料进行标定的场合中,现有技术中常用的标定方法主要 包括两种:其一,利用机械手自带的刷新函数,计算出物料中心距离Tool0的偏移值以及偏 移角度,最后通过类似ToolSet的函数,直接设置成机械手的TCP工具,即可直接使用更新后 的工具进行纠偏放料。其二,采取两步走的方法进行纠偏,第一次拍照计算物料的角度,让 机械手旋转至物料放置的角度一致。第二次拍照计算与标准模板相比较XY的偏移量,再次 让机械手平移到放料位置。 上述第一种物料位置标定方法,虽然比较简单方便,但是标定程序需要跟特定的 机械手进行绑定,不能广泛应用。而第二种物料位置标定方法,适合所有机械手以及执行机 构使用,但是需要拍两次,不适合用于节拍要求严格的场合。
技术实现要素:
本发明的目的在于克服上述存在的问题,提供一种搬运机械手的物料位置标定方 法,该物料位置标定方法只需获取一次物料的图像,搬运机械手即可得到物料对应的偏移 参数,完成纠偏工作,能够应用于各种机械手搬运的标定场合,尤其是适用于节拍要求严格 的场合。 本发明的目的通过以下技术方案实现: 一种搬运机械手的物料位置标定方法,包括以下步骤: 建立物料搬运的平面坐标系,先假设物料的旋转中心为已知的坐标点O已知(OX已知, OY已知);在平面坐标系中,将用于抓取物料的机械手的旋转臂绕着假设的旋转中心在同一个 方向连续转动三次,每次转动的角度相同,位于旋转臂的末端的物料在三次转动后所处的 位置分别用A、B、C代表;根据转动的角度以及坐标规律,求得A、B、C的坐标;连接点A和点B, 并先后求得直线段AB、OA、OB的长度,再求得线段AB和OA在本平面坐标系中的方位角;基于A 点坐标、LOA以及αOA的方位角求得物料的旋转中心,并进行有效验证; 4 CN 111590550 A 说 明 书 2/4 页 先示教一个放料位置,然后让机械手抓取物料,并将物料移动至相机的拍照位置; 相机从下往上对物料进行拍照,并得出物料的特征中心的坐标值以及角度;重新吸取一个 新的物料,相机对其进行拍照,获得当前物料的特征中心的坐标值以及角度;根据绕点旋转 公式,得到物料在旋转后的坐标位置;计算物料在旋转后的偏移量,并向机械手发送对应的 偏移指令,机械手将物料搬运至目标位置上。 本发明的一个优选方案,其中,得到A(AX,AY)和B(BX,BY)的坐标后,通过以下公式 得到线段AB的长度LAB: LAB=SQRT((AX-BX)^2 (AY-BY)^2)。 本发明的一个优选方案,其中,将OA的转动角度设为∠AOB,通过以下公式得到OA 的长度LOA以及OB的长度LOB: LOA=(LAB/2)/SIN((∠AOB/2)*PI( )/180); 由于OAB为以AB为底边的等腰三角形,因此OB的长度LOB=LOA。 本发明的一个优选方案,其中,通过以下公式得到AB在本平面坐标系中的方位角 αAB: αAB=DEGREES(PI( )*(1-SIGN(BY-AY)/2)-ATAN((BX-AX)/(BY-AY))); 其中,若求得的αAB小于0,则αAB加上360。 本发明的一个优选方案,其中,结合AB的方位角αAB,通过以下公式得到OA在本平面 坐标系中的方位角αOA: αAO1=αAB-(90-∠AOB/2); αAO2=αAB (90-∠AO B/2)。 在上述公式中,由于OA具有对称性,通常有两个解,在往后的步骤中将会对两个方 位角αOA求得旋转中心进行有效验证。 本发明的一个优选方案,其中,结合A(AX,AY)、LOA以及αOA,通过以下公式得到物料 的旋转中心O(OX,OY): OX=(AX LOA*COS(αOA*PI( )/180)); OY=(AY LOA*COS(αOA*PI( )/180)); 其中,上述得到物料的旋转中心有两个:O1(OX1,OY1)和O2(OX2,OY2)。 本发明的一个优选方案,其中,求得旋转中心后,通过向量夹角公式分别得到BC与 AO1和AO2的夹角,公式如下: cos











