
技术摘要:
本发明公开了一种人机互动体感车,包括车体以及安装在车体上的车轮,所述车体包括支撑骨架、控制板、传感器、电池和脚踏部件,车轮安装在支撑骨架上,脚踏部件安装在支撑骨架上方,传感器安装在脚踏部件下方,电池给控制板供电,控制板根据传感器的信号控制车轮转动。 全部
背景技术:
人机互动体感车,又叫电动平衡车、思维车,其运作原理主要是建立在一种被称为 “动态稳定”的基本原理上,利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变 化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。 现有的人机互动体感车一般分为有操作杆和无操作杆这两类,其中带操作杆的人 机互动体感车,其人机互动体感车的前进、后退及转向均由操作杆来进行具体操作控制。而 不带操作杆的人机互动体感车,其人机互动体感车的前进、后退是由整个人机互动体感车 的倾斜来控制,转向则由使用者脚踏在脚踏平台上,并通过两个脚踏平台之间相对旋转角 度差来进行控制实现。其中 ,不带操作杆的两轮人机互动体感车主要为专利 CN201410262108.8所揭示的两轮自平衡人机互动体感车为代表,该平衡车中的内盖包括对 称设置的左内盖与右内盖,且左内盖相对右内盖转动连接。但是采用左右两侧脚踏部位的 相对转动来控制车辆转弯,结构相对复杂,零部件较多,制造成本较高。 公开号为CN108297999A、CN106627895A、CN108725648A、CN106560386A、 CN105416486A等专利文献以及他们的系列申请文献公开了一种人机互动体感车,通过压力 传感器检测使用者站立在脚踏板上时左脚前部、左脚跟部、右脚前部与右脚跟部踩踏的位 置所受的力的变化情况,获取使用者的驾驶操作意图,即通过两脚压力差来实现转向。但是 这些专利文献所公开的方案在实际实施过程中,仍旧存在结构复杂、零部件多、组装繁琐、 制造成本高等问题。
技术实现要素:
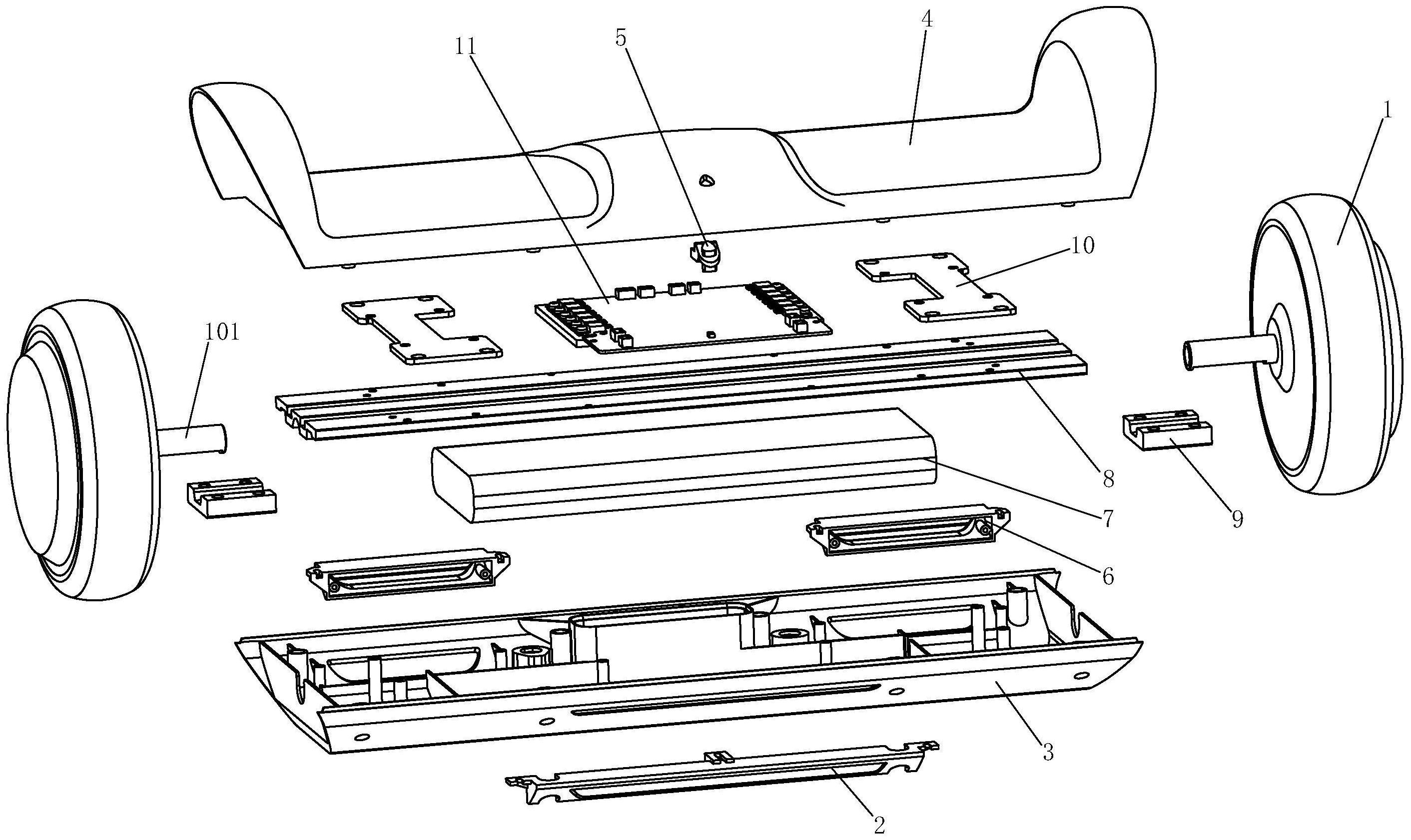
为了解决上述的技术问题,本发明的目的是提供一种结构简单可靠、制造成本低 的人机互动体感车。 为了达到上述的目的,本发明采用了以下的技术方案: 一种人机互动体感车,包括车体以及安装在车体上的车轮(1),所述车体包括支撑 骨架(8)、控制板(11)、传感器、电池(7)和脚踏部件,车轮(1)安装在支撑骨架(8)上,脚踏部 件安装在支撑骨架(8)上方,传感器安装在脚踏部件下方,电池(7)给控制板(11)供电,控制 板(11)根据传感器的信号控制车轮(1)转动。 作为优选,车体还包括包裹在外面的上盖(4)和下盖(3);进一步优选,脚踏部件是 与车体上盖(4)一体成型的塑料件。 作为优选,支撑骨架(8)包括用于与车轮连接的车轮连接部和用于支撑脚踏部件 的支撑部,车轮连接部和支撑部一体成型或者直接固定连接或者经由其他刚性部件间接固 定连接。 作为优选,支撑骨架(8)为一体成型的板状结构;进一步优选,支撑骨架(8)采用铝 4 CN 111591382 A 说 明 书 2/9 页 质型材制成。 作为优选,脚踏部件为与车体上盖(4)连为一体的脚踏部(42)。 或者优选,脚踏部件是相对于支撑骨架(8)和车体上盖(4)能够独立活动并能产生 相对位移变化的脚踏底板,脚踏底板与车体上盖(4)之间可以通过柔性部件或柔性结合部 相连。 作为优选,脚踏部件的上表面粘贴有防滑贴或防滑脚垫。 作为优选,传感器为板状或片状的压力传感器(10),压力传感器(10)设置在脚踏 部件和支撑骨架(8)之间;进一步优选,压力传感器(10)包括前后两个端部以及连接两个端 部的连接部,该连接部固定在支撑骨架(8)上面或者脚踏部件底部。 作为优选,车轮(1)采用轮毂电机,两个车轮(1)的车轮轴(101)分别通过固定件 (9)固定在支撑骨架(8)的两端;进一步优选,车轮轴(101)安装在支撑骨架(8)的下方,支撑 骨架(8)和固定件(9)上开设有与车轮轴(101)相配合的凹槽。 作为优选,车体的上盖(4)为一体成型的塑料件,包括左右两个脚踏部(42),两个 脚踏部(42)之间通过中间部(41)相连,两个脚踏部(42)外侧设有用于遮盖车轮(1)的轮盖 部(43)。 进一步优选,在脚踏部(42)的底部前侧和后侧各设有两个用于与压力传感器(10) 相抵接触传递压力的施压部(421),脚踏部(42)的底部前侧和后侧各设有两个与压力传感 器(10)配合的定位柱(422)。 作为优选,车体的下盖(3)为一体成型的塑料件,下盖(3)固定在支撑骨架(8)的下 方,上盖(4)与下盖(3)固定连接,电池(7)安装在支撑骨架(8)下方、下盖(3)的电池空间 (302)内,控制板(11)安装在支撑骨架(8)上方。 作为优选,上盖(4)固定在支撑骨架(8)上,下盖(3)与上盖(4)固定连接;或者,上 盖(4)和下盖(3)分别与支撑骨架(8)固定连接。 作为优选,电池(7)安装在支撑骨架(8)和下盖(3)之间,或者电池(7)安装在支撑 骨架(8)和上盖(4)之间;控制板(11)安装支撑骨架(8)和下盖(3)之间,或者控制板(11)安 装在支撑骨架(8)和上盖(4)之间。 作为优选,上盖(4)的中间部(41)向上拱起从而在其下方形成有中间容纳空间 (411),控制板(11)容纳在该中间容纳空间(411)内并固定在支撑骨架(8)上面。 作为优选,车体前侧或后侧设置有上下贯通的提手孔(45),从而在车体前侧或后 侧中间形成一个提手(44)。 作为优选,支撑骨架与下盖融为一体。 一种人机互动体感车,包括车体以及安装在车体上的车轮(1),所述车体包括下 盖、控制板(11)、传感器、电池(7)和脚踏部件,车轮(1)安装在下盖上,脚踏部件安装在下盖 上方,传感器安装在脚踏部件下方,电池(7)给控制板(11)供电,控制板(11)根据传感器的 信号控制车轮(1)转动。 作为优选,下盖由金属或其他具有支撑刚性的材料一体成型制成;或者,下盖包括 用于车体承重的主架部和暴露于车体外表面的外观部,该主架部和外观部是同种材质一体 成型,或者是采用不同种材质一次成型或分次成型或分体组装成一体;进一步优选,脚踏部 件是与车体上盖(4)一体成型的塑料件或者相对于支撑骨架(8)和车体上盖(4)能够独立活 5 CN 111591382 A 说 明 书 3/9 页 动并能产生相对位移变化的脚踏底板。 本发明由于采用了以上的技术方案,采用独立的内部支撑骨架或者与下盖融为一 体的支撑骨架,上盖不再作为承重部件,车体上盖就可以由塑料材质等成本较低、重量轻、 装饰效果更好的材料制成,并且车体重心下降,结构简化,零部件数量大大减少,大大降低 制造成本,车体平台更薄增加离地高度,提高了通过性,车体体积减小重量更轻更便于携带 搬运。在达到人机互动体感车的功能要求前提下,优化了产品结构,降低了产品生产成本。 附图说明 图1为本发明实施例1的立体图(前侧); 图2为本发明实施例1的立体图(后侧); 图3为本发明实施例1的爆炸图; 图4为本发明实施例1的俯视图; 图5为图4的A-A剖视图; 图6为图4的B-B剖视图; 图7为图4的C-C剖视图; 图8为本发明实施例1的立体图(去除上盖); 图9为本发明实施例1的立体图(去除下盖); 图10为本发明上盖的内部结构示意图; 图11为本发明下盖的内部结构示意图。 其中,附图标记说明如下: 车轮1;车轮轴101;前灯2;下盖3;下连接柱301;电池空间302;前灯孔303;扬声器 空间304;后灯孔305;固定柱306;上盖4;上连接柱401;中间部41;中间容纳空间411;指示灯 孔412;脚踏部42;施压部421;定位柱422;轮盖部43;提手44;提手孔45;指示灯5;后灯6;电 池7;支撑骨架8;固定件9;压力传感器10;定位孔1001;控制板11。











