
技术摘要:
本申请涉及一种自动回充方法、装置、存储介质及系统,属于计算机技术领域,该方法包括:在自动回充过程中启动图像采集组件采集自动回充图像;在自动回充图像包括特征标识时,基于特征标识在自动回充图像中的位置,确定充电基座的充电面与自动回充装置的相对位置关系; 全部
背景技术:
随着智能化的不断发展,自移动设备(比如:扫地机器人、智能割草机等)使用一段 时间后可自行回到充电基座进行充电。此时,自移动设备需要确定出充电基座的位置。 目前,自移动设备确定充电基座位置的方式包括:通过充电基座不断发送信号,自 移动设备接收到该信号后,基于该信号确定出充电基座的位置。充电基座发出的信号包括 红外信号、超声波信号、激光雷达信号等。 然而,上述信号容易受环境因素影出现干扰,此时,自移动设备会出现无法找到充 电基座的情况。
技术实现要素:
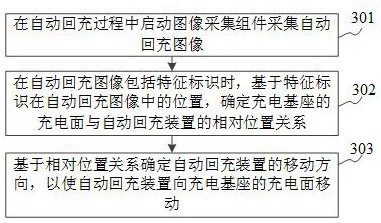
本申请提供了一种自动回充方法、装置、存储介质及系统,可以解决基于信号定位 充电基座的位置时,容易出现自动回充装置无法找到充电基座的问题。本申请提供如下技 术方案: 第一方面,提供了一种自动回充方法,用于自动回充装置中,所述自动回充装置安装有 图像采集组件,所述方法包括: 在自动回充过程中启动所述图像采集组件采集自动回充图像; 在所述自动回充图像包括特征标识时,基于所述特征标识在所述自动回充图像中的位 置,确定充电基座的充电面与所述自动回充装置的相对位置关系;所述特征标识设置于所 述充电基座上,并通过所述充电基座的充电面展示;所述充电基座用于为所述自动回充装 置充电; 基于所述相对位置关系确定所述自动回充装置的移动方向,以使所述自动回充装置向 所述充电基座的充电面移动。 可选地,所述特征标识的数量为至少一个;所述基于所述特征标识在所述自动回 充图像中的位置,确定充电基座的充电面与所述自动回充装置的相对位置关系,包括: 获取所述特征标识在所述充电面上的安装位置; 基于所述特征标识在所述自动回充图像中的位置和所述安装位置,确定所述充电面与 所述自动回充装置之间的距离和角度。 可选地,所述特征标识的数量为至少两个,所述方法还包括: 确定所述自动回充图像是否包括至少两个特征标识; 在所述自动回充图像包括所述至少两个特征标识时,触发执行所述基于所述特征标识 在所述自动回充图像中的位置,确定充电基座的充电面与所述自动回充装置的相对位置关 系的步骤。 可选地,所述特征标识的数量为至少两个,所述基于所述特征标识在所述自动回 4 CN 111596694 A 说 明 书 2/8 页 充图像中的位置和所述安装位置,确定所述充电面与所述自动回充装置之间的距离和角 度,包括: 对于每个特征标识,基于所述特征标识的安装位置确定所述图像采集组件与所述特征 标识在与地面垂直的方向上的第一垂直方向距离; 获取所述特征标识的图像位置与所述自动回充图像的图像中心点在所述与地面垂直 的方向上的第二垂直方向距离; 基于所述第一垂直方向距离、所述第二垂直方向距离、以及所述图像采集组件的焦距, 计算所述图像采集组件与所述特征标识在行进方向上的第一方向距离; 获取所述特征标识的图像位置与所述自动回充图像的图像中心点在与地面平行的方 向上的第二方向图像距离; 基于所述第一方向距离和所述第二方向图像距离以及所述图像采集组件的焦距,计算 所述图像采集组件与所述特征标识在与所述地面平行、且与所述行进方向垂直的方向上的 第二方向距离; 基于每个特征标识的第一方向距离、每个特征标识的第二方向距离,确定所述充电面 与所述自动回充装置之间的角度。 可选地,至少两个特征标识通过所述充电面展示的展示位置相对于地面的高度相 同或不同;和/或,至少两个特征标识通过所述充电面展示的展示位置呈中心对称。 可选地,所述在自动回充过程中启动所述图像采集组件采集自动回充图像,包括: 在所述自动回充装置的电量低于预设电量值时,启动所述图像采集组件采集所述自动 回充图像;或者, 在接收到充电指令时,启动所述图像采集组件采集所述自动回充图像。 第二方面,提供了一种自动回充装置,用于自动回充装置中,所述自动回充装置安 装有图像采集组件,所述装置包括: 图像采集模块,用于在自动回充过程中启动所述图像采集组件采集自动回充图像; 位置确定模块,用于在所述自动回充图像包括特征标识时,基于所述特征标识在所述 自动回充图像中的位置,确定充电基座的充电面与所述自动回充装置的相对位置关系;所 述特征标识设置于所述充电基座上,并通过所述充电基座的充电面展示;所述充电基座用 于为所述自动回充装置充电; 移动控制模块,用于基于所述相对位置关系确定所述自动回充装置的移动方向,以使 所述自动回充装置向所述充电基座的充电面移动。 第三方面,提供一种自动回充装置,所述装置包括处理器和存储器;所述存储器中 存储有程序,所述程序由所述处理器加载并执行以实现第一方面所述的自动回充方法。 第四方面,提供一种计算机可读存储介质,所述存储介质中存储有程序,所述程序 由所述处理器加载并执行以实现第一方面所述的自动回充方法。 第五方面,提供一种充电基座,所述充电基座设置有特征标识,以供自动回充装置 在自动回充过程中启动图像采集组件采集包括所述特征标识的自动回充图像;基于所述特 征标识在所述自动回充图像中的位置确定充电基座与所述自动回充装置的相对位置关系; 基于所述相对位置关系确定所述自动回充装置向所述充电基座的移动方向。 第六方面,提供一种自动回充系统,所述系统包括自动回充装置和充电基座; 5 CN 111596694 A 说 明 书 3/8 页 所述自动回充装置包括第二方面或第三方面提供的自动回充装置; 所述充电基座包括第五方面提供的充电基座。 本申请的有益效果在于:通过在自动回充过程中启动图像采集组件采集自动回充 图像;在自动回充图像包括特征标识时,基于特征标识在自动回充图像中的位置,确定充电 基座的充电面与自动回充装置的相对位置关系;该特征标识通过充电基座的充电面展示; 基于相对位置关系确定自动回充装置的移动方向,以使自动回充装置向充电基座的充电面 移动;可以解决基于信号定位充电基座的位置时,容易出现自动回充装置无法找到充电基 座的问题;由于通过在充电基座的充电面设置特征标识,自动回充装置识别该特征标识以 确定与充电面之间的相对位置关系,可以保证自动回充装置能够找到充电基座,同时可以 保证自动回充装置能够确定出充电基座的充电面,提高自动回充装置确定出的移动方向的 准确性。 上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段, 并可依照说明书的内容予以实施,以下以本申请的较佳实施例并配合附图详细说明如后。 附图说明 图1是本申请一个实施例提供的自动回充系统的结构示意图; 图2是本申请一个实施例提供的充电基座的结构图; 图3是本申请一个实施例提供的自动回充方法的流程图; 图4是本申请一个实施例提供的充电面与自动回充装置的相对位置关系的示意图; 图5是本申请另一个实施例提供的充电面与自动回充装置的相对位置关系的示意图; 图6是本申请另一个实施例提供的充电面与自动回充装置的相对位置关系的示意图; 图7是本申请另一个实施例提供的充电面与自动回充装置的相对位置关系的示意图; 图8是本申请一个实施例提供的自动回充装置的框图; 图9是本申请一个实施例提供的自动回充装置的框图。











