
技术摘要:
本发明公开了一种乒乓球回收机器人,包括机器人外壳,所述机器人外壳内设有机器人空腔,所述机器人空腔内设有作动装置,所述作动装置包括隔断底板,所述隔断底板固定设置在所述机器人空腔后侧内壁上,所述隔断底板上固定设有摆动杆底座,所述摆动杆底座上转动设有摆动 全部
背景技术:
机器人是一种可以半自主或者自主帮助人类完成危险、繁重或复杂的工作,乒乓 球作为老少皆宜的体育运动,在捡球时需要人为去捡,尤其在练习时,过多的乒乓球需要人 为弯腰去捡,由于乒乓球较小且弹性好,会跑到场地的各个地方,人为捡球工作较为繁琐劳 累,并且占用大量时间。
技术实现要素:
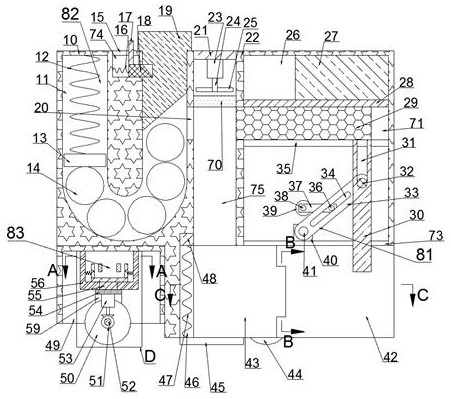
本发明要解决的技术问题是提供一种乒乓球回收机器人,克服人为需要弯腰捡 球,工作较为繁琐劳累,并且占用大量时间等情况。 本发明是通过以下技术方案来实现的。 本发明的一种乒乓球回收机器人,包括机器人外壳,所述机器人外壳内设有机器 人空腔,所述机器人空腔内设有作动装置,所述作动装置包括隔断底板,所述隔断底板固定 设置在所述机器人空腔后侧内壁上,所述隔断底板上固定设有摆动杆底座,所述摆动杆底 座上转动设有摆动杆底座转轴,所述摆动杆底座转轴上固定设有摆动杆,所述摆动杆内设 有摆动杆滑槽,所述摆动杆滑槽贯穿所述摆动杆前后端面,所述摆动杆顶端固定设有连动 杆滑块,所述摆动杆底座上侧设有作动电机,所述作动电机固定设置在所述机器人空腔后 侧内壁上,所述作动电机前端转动设有作动电机轴,所述作动电机轴上固定设有旋杆,所述 旋杆右端固定设有摆动杆滑块,所述摆动杆滑块滑动设置在所述摆动杆滑槽内,所述作动 电机上侧设有推球杆滑道,所述推球杆滑道内设有向左开口的推球杆空腔,所述推球杆空 腔下侧设有连动杆滑道,所述连动杆滑道贯穿所述推球杆空腔下侧壁,所述推球杆空腔内 滑动设有推球杆,所述推球杆下端面固定设有连动杆,所述连动杆内设有连动杆滑槽,所述 连动杆滑槽内滑动设有所述连动杆滑块;所述作动装置左侧设有收集装置,所述收集装置 包括乒乓球存储仓,所述乒乓球存储仓设置在所述机器人外壳内,所述乒乓球存储仓开口 向上,所述乒乓球存储仓内滑动设有推板,所述推板与所述乒乓球存储仓上侧内壁间通过 所述推板弹簧连接,所述乒乓球存储仓内科容纳八个乒乓球,所述推板弹簧右侧设有堵头, 所述堵头可堵住所述乒乓球存储仓右侧口;所述收集装置下侧设有行进装置,所述行进装 置包括动轮空腔,所述动轮空腔开口朝下,所述动轮空腔内设有转向底座,所述转向底座固 定设置在所述动轮空腔上侧内壁,所述转向底座内设有封闭转向底座空腔,所述转向底座 空腔内转动设有偏转面轮,所述偏转面轮左端设有第一偏转杆,所述第一偏转杆与所述转 向底座空腔左侧壁之间通过第一偏转弹簧连接,所述第一偏转杆右侧设有第一偏转电磁 铁,所述第一偏转电磁铁固定设置在所述转向底座空腔后侧内壁上,所述第一偏转电磁铁 右侧设有第二偏转电磁铁,所述第二偏转电磁铁固定设置在所述转向底座空腔前侧内壁 上,所述第二偏转电磁铁右侧设有第二偏转杆,所述第二偏转杆固定设置在所述偏转面轮 4 CN 111544864 A 说 明 书 2/5 页 右端,所述第二偏转杆与所述转向底座空腔右侧内壁之间通过第二偏转弹簧连接,所述偏 转面轮下端面固定设有转轴,所述转轴贯穿所述转向底座空腔下侧壁,所述转轴可在所述 转向底座内转动,所述转轴下端固定设有连接板,所述连接板下端面固定设有两个前后对 称的动轮轴支撑板,所述两个动轮轴支撑板之间设有动轮电机,所述动轮电机固定设置在 所述连接板下端面,所述动轮电机下端转动设有动轮电机轴,所述动轮电机轴下端固定设 有主动锥齿轮,所述主动锥齿轮下侧设有动轮轴,所述动轮轴转动设置在所述动轮轴支撑 板之间,所述动轮轴上固定设有两个前后对称的主动轮,所述两个主动轮之间设有从动锥 齿轮,所述从动锥齿轮固定设置在所述动轮轴上,所述从动锥齿轮与所述主动锥齿轮之间 通过啮合传动;优选地,所述连动杆滑道不允许所述推球杆通过,所述连动杆可在所述连动 杆滑道内滑动。 优选地,所述收集装置包括卡块空腔,所述卡块空腔设置在所述机器人外壳内,所 述卡块空腔上侧设有拨杆滑道,所述拨杆滑道贯穿所述卡块空腔上侧壁,所述卡块空腔内 滑动设有卡扣,所述与所述卡块空腔左侧内壁之间通过卡扣弹簧连接,所述卡扣上端面固 定设有拨杆,所述拨杆可在所述拨杆滑道内滑动,所述卡扣可以卡住所述堵头。 优选地,所述机器人空腔内设有识别模块,所述识别模块固定设置在所述机器人 空腔上侧内壁上。 优选地,所述作动装置左侧设有气道空腔,所述气道空腔上下开口,所述气道空腔 内设有端盖,所述端盖允许空气通过,所述端盖固定设置在所述气道空腔内侧周壁,所述端 盖下端固定设有气道电机,所述气道电机下端转动设有气道电机轴,所述气道电机轴上固 定设有气道,所述气道下侧设有挡球板,所述挡球板允许空气通过,所述挡球板固定设置在 所述气道空腔内侧周壁,所述挡球板下侧设有进球口,所述进球口贯穿所述气道空腔左侧 壁,所述进球口允许所述乒乓球通过。 优选地,所述气道空腔下侧设有基座,所述基座前后侧外壁转动设有两个前后对 称的副轮,所述基座左侧设有抬升滑道,所述抬升滑道内滑动设有抬升板,所述抬升滑道内 设有抬升电磁铁,所述抬升电磁铁固定设置在所述抬升滑道上侧内壁,所述抬升板与所述 抬升电磁铁之间通过抬升弹簧连接,所述基座右侧设有两个前后对称的开合板,所述开合 板与所述基座前后侧壁之间通过铁芯转动连接,所述两个开合板与所述连动杆之间通过开 合弹簧连接。 本发明的有益效果 :本发明通过机器人自带识别模块识别地上的乒乓球,然后驱 动机器人靠近乒乓球并利用风压吸入乒乓球,机器人内置乒乓球存储仓,在吸入乒乓球后 可以存储乒乓球以供下次使用,并且在拾取乒乓球过程中,如若没有乒乓球在附近则关闭 入口,防止其他垃圾等物体进入机器人内部。 附图说明 为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有 技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。 图 1 是本发明实施例的结构示意图; 5 CN 111544864 A 说 明 书 3/5 页 图 2 是本发明实施例图1中A-A方向的示意图; 图 3 是本发明实施例图1中B-B方向的示意图; 图 4 是本发明实施例图1中C-C方向的示意图; 图 5 是本发明实施例图1中D处的放大示意图。











