
技术摘要:
本发明公开了一种半球摄影中心点位置定位方法,采用鱼眼摄像头拍摄植被冠层图像,其中间圆形部分或圆形切割部分为实景区域,其余为背景区域,然后通过对实景区域作割线处理,最后基于处理后的割线计算实景图区域的中心位置。
背景技术:
叶面积指数(LAI)测量技术中,半球摄影测量法具有成本低、易于升级、便于组网 等优点,广泛用于地面测量与星地验证实验。半球摄影测量法有一套固定操作流程。首先是 图像采集与数据处理,通过鱼眼摄像头拍摄植被图像;然后进行图像植被冠层结构分析,主 要手段是分割背景和叶片得到冠层二值图像;最后通过相关数学模型计算LAI值等相关参 数,然而LAI数值反演算法需要对图片的中心进行精确定位,而鱼眼摄像头最终生成的图像 中间圆形部分或圆形切割部分为实景图像区域,周边为底片区域,因为工艺规格等原因,每 个鱼眼摄像头的成像区域会有一定的偏差,所以实际圆心并不是矩形图像几何中心,因此 需要对图像中心重新定位。
技术实现要素:
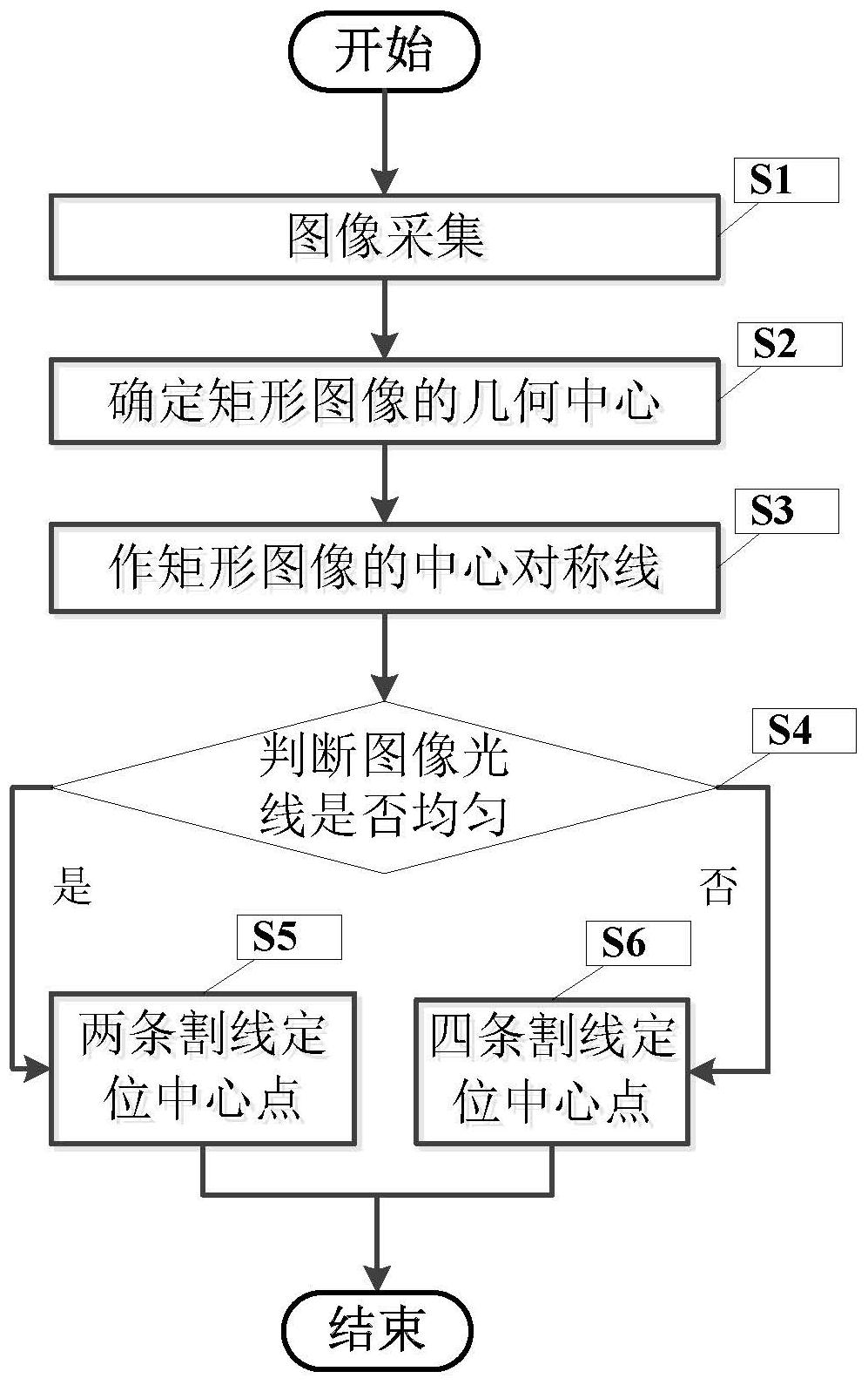
本发明的目的在于克服现有技术的不足,提供一种半球摄影中心点位置定位方 法,通过多条割线的中垂线交点来精确定位实景成像区域中心。 为实现上述发明目的,本发明一种半球摄影中心点位置定位方法,其特征在于,包 括以下步骤: (1)、采用鱼眼摄像头拍摄植被冠层图像,其分辨率大小为2a×2b,在矩形图像中 间圆形部分或圆形切割部分为实景区域,周边为背景区域; (2)、根据矩形图像分辨率确定矩形图像几何中心O1(a ,b),(a,b)为几何中心O1的 坐标; (3)、以几何中心O1为基点,作矩形图像的中心对称线,与实景区域边缘横向交于L 与R两点,纵向交于U与V两点; (4)、观察矩形图像的四角是否有实景边缘和背景边缘过渡不清晰区域,如果没 有,则进入步骤(5),否则进入步骤(6); (5)、利用两条割线定位中心点位置; (5.1)、将交点U向下偏移 个像素,交点L向右偏移 个像素,然 后以偏移后的点分别作割线,或者偏移交点R、V,然后再以偏移后的点作割线,但始终保持 存在一条水平割线和一条垂直割线; (5.2)、水平割线与实景区域边缘横向交于C、D两点,垂直割线与实景区域边缘纵 向交于A、B两点; (5.3)、以线段AB中点和线段CD中点作垂线,垂线交点记为O2; 3 CN 111598940 A 说 明 书 2/4 页 (5.4)、计算O1与O2的横纵坐标差,如果O1与O2的横纵坐标差均小于 则 将交点O2作为定位的中心点位置,否则,定位失败; (6)、利用四条割线定位中心点位置; (6.1)、将交点U、L、R、V分别向几何中心O1内偏移 个像素,然后以偏移后 的四个交点分别作割线,从而得到四条割线; (6.2)、上、下两条水平割线与实景区域边缘横向交于C、D两点和H、G两点,左、右两 条垂直割线与实景区域边缘纵向交于A、B两点和E、F两点; (6.3)、以线段AB中点和线段CD中点作垂线,垂线交点记为O2;以线段EF中点和线 段HG中点作垂线,垂线交点记为O3; (6.4)、比较O2、O3与O1的横纵坐标距离,将O2、O3中横坐标距离O1横坐标最近的作为 新中心点O的横坐标,将O2、O3中纵坐标距离O1纵坐标最近的作为新中心点O的纵坐标; (6.5)、计算O1与O的横纵坐标差,如果O1与O的横纵坐标差均小于 则将 新中心点O作为定位的中心点位置,否则,定位失败。 本发明的发明目的是这样实现的: 本发明一种半球摄影中心点位置定位方法,采用鱼眼摄像头拍摄植被冠层图像, 其中间圆形部分或圆形切割部分为实景区域,其余为背景区域,然后通过对实景区域作割 线处理,最后基于处理后的割线计算实景图区域的中心位置。 同时,本发明一种半球摄影中心点位置定位方法还具有以下有益效果: (1)、本发明根据不同的图像采用2条或4条割线参与运算,当4条割线参与运算时, 利用对角互补原理,能够消除当采用2条割线时由于光线原因出现实景边缘区域和底片区 域模糊不清而导致取点误判断,进而使所得圆心向高亮区域方向大幅偏移的现象,从而提 高半球摄影中心定位精度。 (2)、本发明使用于绝大多数图像,具有很高的鲁棒性。 附图说明 图1是本发明一种半球摄影中心点位置定位方法流程图; 图2是两条割线定位中心点位置的原理图; 图3是两条割线定位中心点位置的效果图; 图4是四条割线定位中心点位置的原理图; 图5是四条割线定位中心点位置的效果图。











