
技术摘要:
本申请涉及机器人领域,揭示了机器臂信号处理方法,包括:将机器臂指定关节的关节信息输入至前馈处理通道进行运算,得到所述关节信息对应的第一数据,其中,指定关节为机器臂中的所有关节中任意一个,关节信息包括控制关节运动的电机脉冲信号,第一数据包括从电机脉冲 全部
背景技术:
协作型机械臂具有力反馈感知敏感、运动灵活度高等特点,协作机械臂的常用控 制技术包含运动轨迹控制、末端执行器速度控制、力反馈控制、零阻尼控制等。目前在机械 臂的运动轨迹控制、末端速度控制、力反馈控制中均需要获取机械臂关节处高质量的位置 信号、速度信号等反馈信号。目前获取这些反馈信号大多采用低通滤波器、微分等处理方 式,但这些传统处理算法难以兼容信号跟随的快速性和低噪声特性,不能满足机械臂平滑 运动的需求。
技术实现要素:
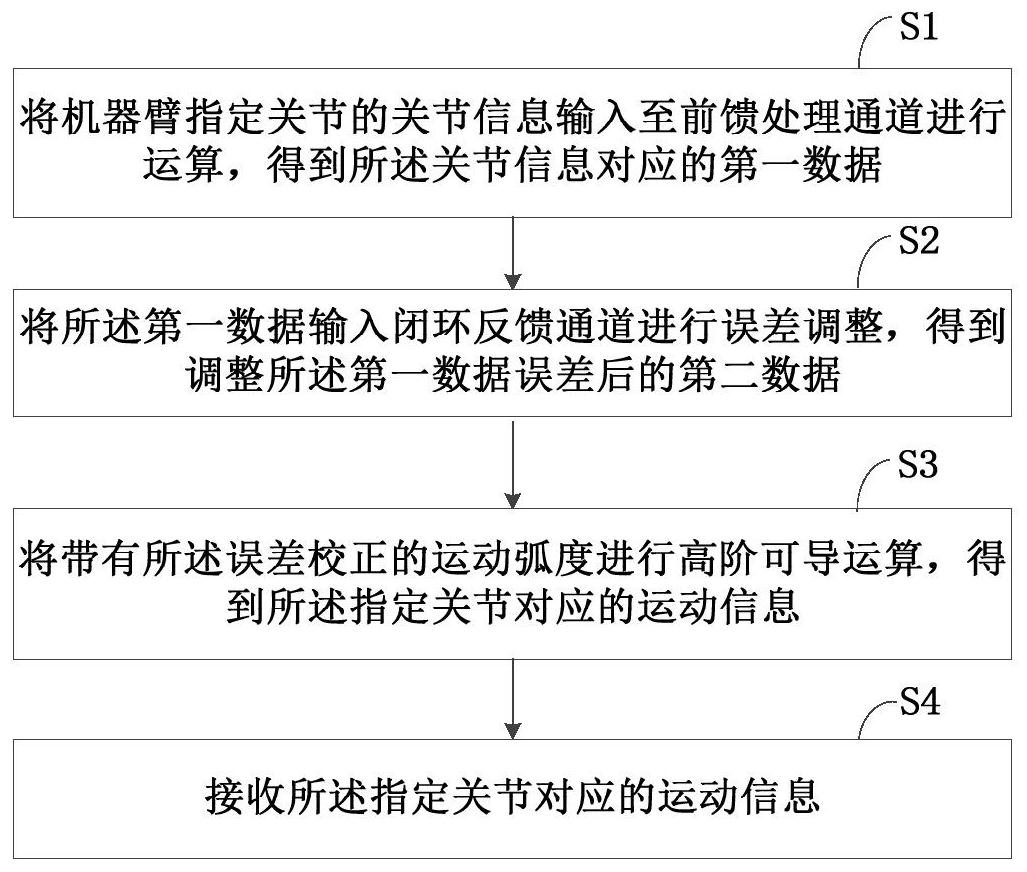
本申请的主要目的为提供机器臂信号处理方法,旨在解决现有机械臂运动轨迹控 制不能满足机械臂平滑运动的需求的技术问题。 本申请提出一种机器臂信号处理方法,包括: 将机器臂指定关节的关节信息输入至前馈处理通道进行运算,得到所述关节信息 对应的第一数据,其中,所述指定关节为所述机器臂中的所有关节中任意一个,所述关节信 息包括控制关节运动的电机脉冲信号,所述第一数据包括从所述电机脉冲信号中计算的运 动弧度; 将所述第一数据输入闭环反馈通道进行误差调整,得到调整所述第一数据误差后 的第二数据,其中,所述第二数据包括误差校正; 将带有所述误差校正的运动弧度进行高阶可导运算,得到所述指定关节对应的运 动信息,其中,所述运动信息包括位置信号、角速度信号和加速度信号; 接收所述指定关节对应的运动信息。 优选地,所述高阶可导运算包括二阶可导运算,所述将带有所述误差校正的运动 弧度进行高阶可导运算,得到所述指定关节对应的运动信息的步骤,包括: 将带有所述误差校正的运动弧度进行积分运算,得到所述位置信息; 将所述位置信息进行一阶求导得到所述角速度; 将所述位置信息进行二阶求导得到所述加速度。 优选地,所述将所述位置信息进行二阶求导得到所述加速度的步骤,包括: 将所述位置信息进行二阶求导得到二阶导数; 将所述二阶导数进行滤波,得到所述加速度信息。 优选地,所述将所述第一数据输入闭环反馈通道进行误差调整,得到调整所述第 一数据误差后的第二数据的步骤,包括: 接收所述前馈处理通道对所述关节信息进行不完全微分,得到的表征当前时刻运 4 CN 111590568 A 说 明 书 2/11 页 动趋势的所述第一数据,其中,所述前馈处理通道包括依次串联的第一量纲转换和不完全 微分; 将所述第一数据根据所述当前时刻的前一时刻输出的位置信息,进行误差调整得 到所述第二数据。 优选地,所述闭环反馈通道包括封闭环接的前向通道和反馈通道,所述反馈通道 中串联第二量纲转换,所述将所述第一数据根据所述当前时刻的前一时刻输出的位置信 息,进行误差调整得到所述第二数据的步骤,包括: 获取所述当前时刻的前一时刻输出的位置信息; 将所述当前时刻的前一时刻输出的位置信息通过所述第二量纲转换,得到所述当 前时刻的前一时刻输出的位置信息对应的脉冲信号; 将所述当前时刻的前一时刻输出的位置信息对应的脉冲信号,与所述第一数据进 行跟踪修正,使所述当前时刻的前一时刻输出的位置信息对应的脉冲信号趋近于所述当前 时刻捕获的关节信息。 优选地,所述接收所述指定关节对应的运动信息的步骤之后,包括: 将所述位置信号输入到正运动学方程进行求解,得到所述机器臂的末端位姿; 将所述角速度信号进行几何雅克比运算,得到所述机器臂的末端速度; 根据所述机器臂的末端位姿和末端速度,控制所述机器臂进行协作运动。 本申请还提供了一种机器臂信号处理装置,包括: 第一输入模块,用于将机器臂指定关节的关节信息输入至前馈处理通道进行运 算,得到所述关节信息对应的第一数据,其中,所述指定关节为所述机器臂中的所有关节中 任意一个,所述关节信息包括控制关节运动的电机脉冲信号,所述第一数据包括从所述电 机脉冲信号中计算的运动弧度; 第二输入模块,用于将所述第一数据输入闭环反馈通道进行误差调整,得到调整 所述第一数据误差后的第二数据,其中所述第二数据包括误差校正; 运算模块,用于将带有所述误差校正的运动弧度进行高阶可导运算,得到所述指 定关节对应的运动信息,其中,所述运动信息包括位置信号、角速度信号和加速度信号; 接收模块,用于接收所述指定关节对应的运动信息。 优选地,所述高阶可导运算包括二阶可导运算,所述运算模块包括: 运算单元,用于将带有所述误差校正的运动弧度进行积分运算,得到所述位置信 息; 第一求导单元,用于将所述位置信息进行一阶求导得到所述角速度; 第二求导单元,用于将所述位置信息进行二阶求导得到所述加速度。 本申请还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算 机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。 本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机 程序被处理器执行时实现上述的方法的步骤。 本申请通过结合协作机械臂的控制场景,设计了编码器信号处理算法,以针对编 码器脉冲反馈的信号进行合理的算法处理,优化后的处理算法可提取机械臂各关节的位置 信号和速度信号,具有跟随动态性能快、噪声低的优良特点,基于此技术设计的协作机械臂 5 CN 111590568 A 说 明 书 3/11 页 控制算法,其响应快速性和抗噪声能力显著提高。 附图说明 图1本申请一实施例的机器臂信号处理方法流程示意图; 图1a本申请一实施例的编码器内的数据处理结构框架图; 图2本申请一实施例的机器臂信号处理装置结构示意图; 图3本申请一实施例的计算机设备内部结构示意图。











