
技术摘要:
本发明实施例提供一种碰撞检测方法及装置。本发明实施例通过根据对目标运动设备的操作信息,预测所述目标运动设备的运动轨迹,获取所述目标运动设备所在环境的实时全景视频图像帧,将所述运动轨迹叠加在所述视频图像帧上,得到叠加图像帧,基于所述叠加图像帧,确定当 全部
背景技术:
目前,手术室内的手术设备大多为能够在人的操作下自动运动的机械设备。这些 机械设备在运动过程中,很可能碰撞到手术室内的其他物体,给机械设备或其他物体造成 损害。因此,防止机械设备与其他物体的碰撞非常重要。 相关技术中,在手术室的机械设备上安装传感器,以用于减轻机械设备与其他设 备之间的物理碰撞。这种技术不能防止碰撞,而是在碰撞发生后减轻碰撞程度。
技术实现要素:
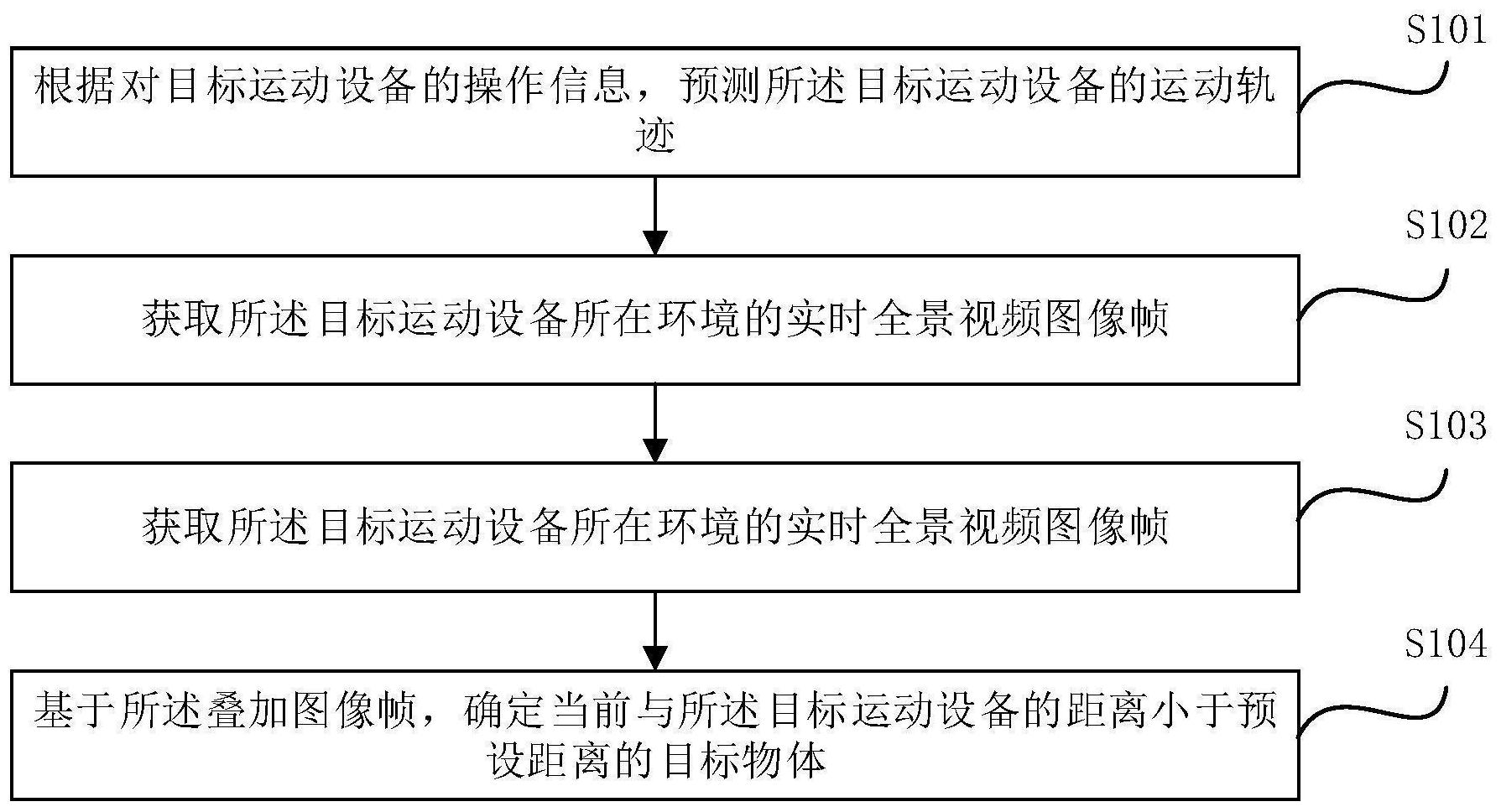
为克服相关技术中存在的问题,本发明提供了一种碰撞检测方法及装置,能够准 确预测机械设备与其他物体的碰撞,有助于实现防止碰撞。 根据本发明实施例的第一方面,提供一种碰撞检测方法,包括: 根据对目标运动设备的操作信息,预测所述目标运动设备的运动轨迹; 获取所述目标运动设备所在环境的实时全景视频图像帧; 将所述运动轨迹叠加在所述视频图像帧上,得到叠加图像帧; 基于所述叠加图像帧,确定当前与所述目标运动设备的距离小于预设距离的目标 物体。 根据本发明实施例的第二方面,提供一种碰撞检测方法,应用于目标运动设备,包 括: 根据对所述目标运动设备的操作信息,预测所述目标运动设备的运动轨迹; 将所述运动轨迹发送给目标服务器,以由所述目标服务器将所述运动轨迹叠加在 所述目标运动设备所在环境的实时全景视频图像帧上,得到叠加图像帧,并基于所述叠加 图像帧,确定当前与所述目标运动设备的距离小于预设距离的目标物体;所述视频图像帧 由所述目标运动设备所在环境的摄像头发送给所述目标服务器; 接收所述服务器发送的检测结果,所述检测结果用于指示所述叠加图像帧中当前 与所述目标运动设备的距离小于预设距离的目标物体。 根据本发明实施例的第三方面,提供一种碰撞检测方法,应用于目标服务器,包 括: 接收根据对目标运动设备的操作信息预测的所述目标运动设备的运动轨迹,以及 接收所述目标运动设备所在环境的实时全景视频图像帧; 将所述运动轨迹叠加在所述视频图像帧上,得到叠加图像帧; 基于所述叠加图像帧,确定当前与所述目标运动设备的距离小于预设距离的目标 物体; 生成检测结果,并将所述检测结果发送给电子设备,所述检测结果用于指示所述 4 CN 111553932 A 说 明 书 2/11 页 叠加图像帧中当前与所述目标运动设备的距离小于预设距离的目标物体。 根据本发明实施例的第四方面,提供一种碰撞检测装置,包括: 预测模块,用于根据对目标运动设备的操作信息,预测所述目标运动设备的运动 轨迹; 获取模块,用于获取所述目标运动设备所在环境的实时全景视频图像帧; 叠加模块,用于将所述运动轨迹叠加在所述视频图像帧上,得到叠加图像帧; 确定模块,用于基于所述叠加图像帧,确定当前与所述目标运动设备的距离小于 预设距离的目标物体。 根据本发明实施例的第五方面,提供一种碰撞检测装置,应用于目标运动设备,包 括: 预测模块,用于根据对所述目标运动设备的操作信息,预测所述目标运动设备的 运动轨迹; 发送模块,用于将所述运动轨迹发送给目标服务器,以由所述目标服务器将所述 运动轨迹叠加在所述目标运动设备所在环境的实时全景视频图像帧上,得到叠加图像帧, 并基于所述叠加图像帧,确定当前与所述目标运动设备的距离小于预设距离的目标物体; 所述视频图像帧由所述目标运动设备所在环境的摄像头发送给所述目标服务器; 接收模块,用于接收所述服务器发送的检测结果,所述检测结果用于指示所述叠 加图像帧中当前与所述目标运动设备的距离小于预设距离的目标物体。 根据本发明实施例的第六方面,提供一种碰撞检测装置,应用于目标服务器,包 括: 接收模块,用于接收根据对目标运动设备的操作信息预测的所述目标运动设备的 运动轨迹,以及接收所述目标运动设备所在环境的实时全景视频图像帧; 叠加模块,用于将所述运动轨迹叠加在所述视频图像帧上,得到叠加图像帧; 确定模块,用于基于所述叠加图像帧,确定当前与所述目标运动设备的距离小于 预设距离的目标物体; 生成及发送模块,用于生成检测结果,并将所述检测结果发送给所述目标运动设 备,所述检测结果用于指示所述叠加图像帧中当前与所述目标运动设备的距离小于预设距 离的目标物体。 本发明实施例提供的技术方案可以包括以下有益效果: 本发明实施例,通过根据对目标运动设备的操作信息,预测所述目标运动设备的 运动轨迹,获取所述目标运动设备所在环境的实时全景视频图像帧,将所述运动轨迹叠加 在所述视频图像帧上,得到叠加图像帧,基于所述叠加图像帧,确定当前与所述目标运动设 备的距离小于预设距离的目标物体,能够准确预测出目标运动设备与其他物体的碰撞,有 助于实现防止碰撞。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本说明书。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本说明书的实 5 CN 111553932 A 说 明 书 3/11 页 施例,并与说明书一起用于解释本说明书的原理。 图1是本发明实施例提供的碰撞检测方法的一个流程示例图。 图2是DSA设备运动示意图。 图3是本发明实施例提供的叠加图像帧示例图。 图4是本发明实施例提供的碰撞检测方法的另一个流程示例图。 图5是本发明实施例提供的碰撞检测方法的另一个流程示例图。 图6是本发明实施例提供的碰撞检测装置的一个功能方块图。 图7是本发明实施例提供的碰撞检测装置的另一个功能方块图。 图8是本发明实施例提供的碰撞检测装置的另一个功能方块图。 图9是本发明实施例提供的电子设备的一个硬件结构图。











