
技术摘要:
本发明提出一种机械爪以及包装机。该机械爪,包括交叉设置的第一导轨和第二导轨,以及可沿所述第一导轨移动的基板,设于所述基板上的旋转驱动件,与所述旋转驱动件连接的第一驱动件,与所述第一驱动件连接以相向或相对运动的两个夹合件,该包装机,包括上述机械爪。本 全部
背景技术:
现有的装箱机,以方形包饮料为例,一般包括把单个通道上输送的产品分成多通 道的分包器、把多通道进入的产品堆垛成所需要数量的产品堆垛组件、用于纸箱存贮组件, 并把纸箱逐一输送到位的纸仓、把堆垛后的产品输送到纸箱上预成型的装箱组件、以及纸 箱的封箱组件,其中封箱组件包括摺叠纸箱各个部位,把产品完全包裹在纸箱内的打包组 件、用封箱胶封合纸箱两侧面的侧面封箱组件以及用封箱胶封合纸箱角边位置的角边封箱 组件。该装箱机实现全自动装箱过程,省时省力,已得到了大量是市场应用。 现有的包装机,在抓取瓶类物料时,往往仅能进行平移,无法旋转,而现有的瓶类 物料,因个性化的设计等原因,大多不是标准的圆形或方形,在将瓶类物料放入包装箱时, 需要调节该物料与包装箱的相对角度,但现有的机械手无法有效地完成。
技术实现要素:
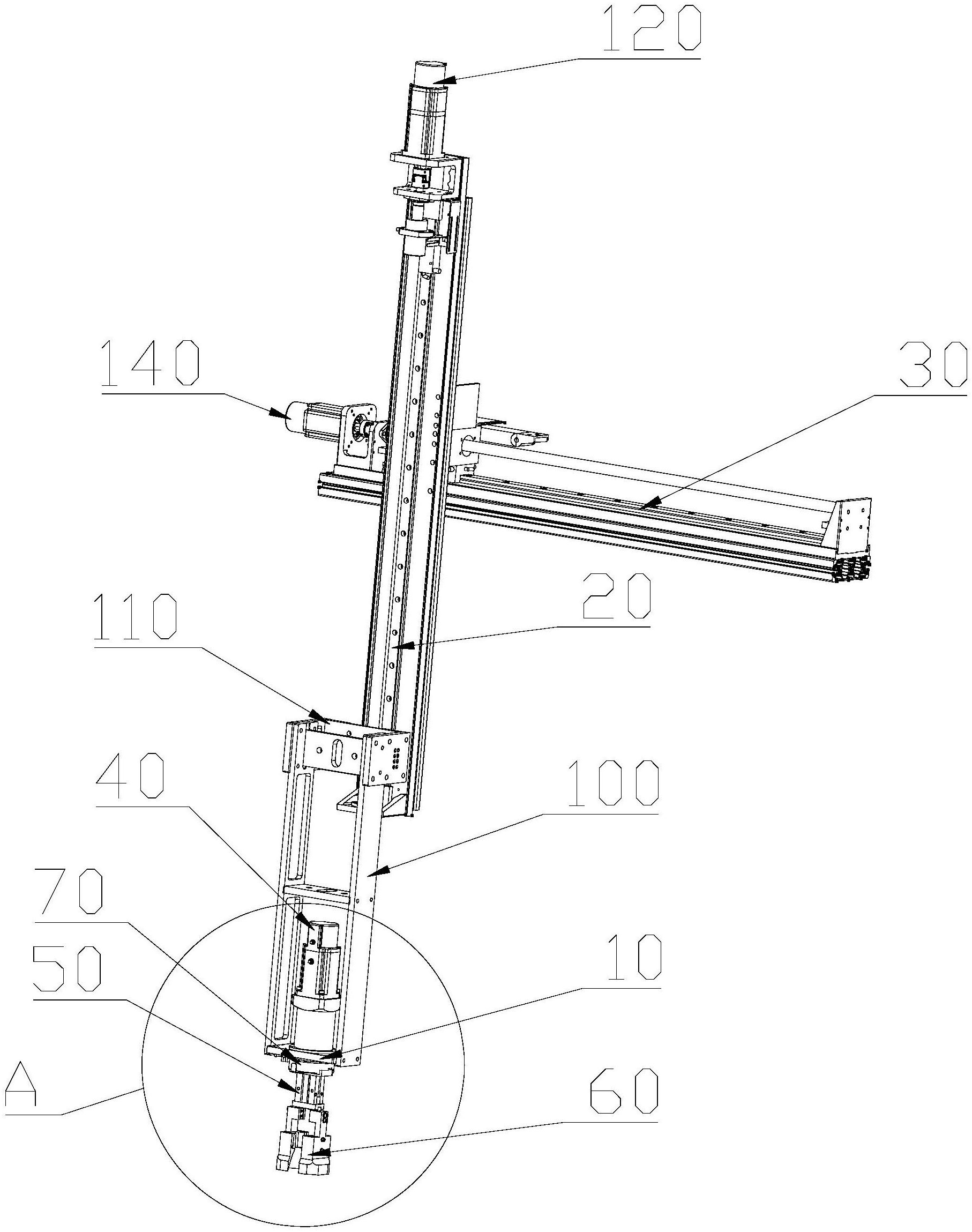
本发明针对上述技术问题,提出一种可调节瓶类物料与包装箱相对位置和角度的 机械爪以及包装机。 为了达到上述目的,本发明采用的技术方案为: 一种机械爪,包括交叉设置的第一导轨和第二导轨,以及可沿所述第一导轨移动 的基板,设于所述基板上的旋转驱动件,与所述旋转驱动件连接的第一驱动件,与所述第一 驱动件连接以相向或相对运动的两个夹合件。 作为优选,所述夹合件包括半圆柱型的第一弯曲面,以及半圆锥型的第二弯曲面, 所述第二弯曲面设于所述第一弯曲面远离所述第一驱动件的一侧。 作为优选,还包括设于所述第一驱动件与所述旋转驱动件之间的转盘,与所述转 盘连接的联动件,以及用于检测所述联动件位置的第一检测件,所述第一检测件与所述旋 转驱动件电性连接以关闭所述旋转驱动件。 作为优选,所述联动件包括与所述转盘连接的联动件本体,以及设于所述联动件 本体一端并向靠近所述基板方向凸起的弯折部。 作为优选,所述第一驱动件为爪型气缸。 作为优选,还包括与所述基板连接的两个连接板,与两个所述连接板连接的连接 架,所述连接架与所述第一导轨连接。 作为优选,还包括与所述连接架连接以驱动所述连接架沿所述第一导轨移动的第 二驱动件,以及与所述第一导轨连接以驱动所述第一导轨沿所述第二导轨移动的第三驱动 件。 作为优选,所述第二驱动件和所述第三驱动件均为电缸。 作为优选,所述第一导轨和所述第二导轨垂直设置。 3 CN 111605772 A 说 明 书 2/3 页 一种包装机,包括如上任一项中所述的机械爪。 与现有技术相比,本发明的优点和积极效果在于: 本发明所述的机械爪,通过将基板设于第一导轨和第二导轨上,实现基板平面上 的位移,通过旋转驱动件、第一驱动件以及夹合件的设置,使得在夹合件将物料夹住后,可 以在水平面上进行旋转调节,从而适应不同包装情况的需要,且采用夹合件进行夹取,相对 于吸盘更加稳定,转动时不易与物料之间产生相对转动,进一步保证了装箱的正常进行。 本发明所述的包装机,包括上述机械爪,通过将基板设于第一导轨和第二导轨上, 实现基板平面上的位移,通过旋转驱动件、第一驱动件以及夹合件的设置,使得在夹合件将 物料夹住后,可以在水平面上进行旋转调节,从而适应不同包装情况的需要,且采用夹合件 进行夹取,相对于吸盘更加稳定,转动时不易与物料之间产生相对转动,进一步保证了装箱 的正常进行。 附图说明 图1为本发明所述机械爪的结构示意图; 图2为本图1所示机械爪的A处的局部放大图; 以上各图中:10、基板;20、第一导轨;30、第二导轨;40、旋转驱动件;50、第一驱动 件;60、夹合件;601、第一弯曲面;602、第二弯曲面;70、转盘;80、联动件;801、联动件本体; 802、弯折部;90、第一检测件;100、连接板;110、连接架;120第二驱动件;130、第三驱动件。











